
|
|
|
Главная -> Понятия метрологии 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 [67] 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 и опорном каналах, и его можно рассматривать как погрешность измерений разности фаз -ср = Ф1 - Ф2. Постоянную во времени или медленно меняющуюся составляющую погрешности вычисляют при установке нуля прибора, а затем в ходе измерений вносят соответствующую поправку. При установке нуля на оба входа фазометра подают одно и то же напряжение и измеряют разность фаз - систематическую погрешность Э, = Ф1о -Ф20, где Фц) и Ф20 - значения фазовых углов Ф1 и Фг при установке нуля. В автоматизированных фазометрах такая операция может производиться перед каждым измерением. Изменение фазовых углов после установки нуля приводит к погрешности Дф = (Ф1 -Фю) -(Фг -Ф2о) = АФ1 -АФг- Эта погрешность обусловлена целым рядом причин, основные из которых будут рассмотрены. В значительной мере погрешность определяется нестабильностью фазочастотных характеристик каналов вследствие нестабильности параметров узкополосных фильтров из-за изменений температуры и старения, а также уходом частоты сигналов. Рассмотрим в качестве примера фазометр с преобразованием частоты (см. рис. 10.1) с фильтрами на LC колебательных контурах. Если не учитывать фазовых сдвигов, вносимых входными цепями и преобразователями, то Ф1=-arctggi, где i = 2QiX X(w -Wp)/«p - обобщенная расстройка; Qi-добротность контура с учетом шунтирующего действия элементов схемы; Шр - резонансная частота контура. Ограничившись малыми расстройками, получим Ф1 = -i = = -2Qi(o) - а)р)/сор. Приращение фазового угла dii <55, <3g где AQi; Дшр и Дш - приращения добротности Q, резонансной частоты контура Шр и частоты сигналов со. Поскольку Qi=u)pL/r, то AQi/Qi = Ar/r. Нестабильность резонансной частоты контура Л«р/о)р=-0,5(AL/L-\-АС/С), где AL и АС - абсолютные изменения индуктивности и емкости контура. Вычислив производные, после преобразований получим дФ,.-2д,+д,(4 + 4£)+20,. (,0.2, Подобным же образом вычисляют и приращение ЛФг для опорного канала. Погрешность Лф = ЛФ1 -ЛФг можно оценить, если известны нестабильности параметров фильтров и частоты измеряемых сигналов. Эффективным способом уменьшения погрешности является использование в каналах идентичных фильтров. Пример 10.1. Определим погрешность Дф фазометра с преобразованием частоты, вызванную изменением температуры Д7° = 10°С. Фильтры построены на колебательных контурах с добротностями Qi = 100 и q2 = 90. Для элементов обоих контуров температурный коэффициент индуктивности (AL/L°C) = \0, температурный коэффициент емкости (АС/С °С) = \0~*, изменением потерь можно пренебречь, шягшр. Погрешность измерения разности фаз Отсюда получим Дф = (10-+IQ-")-10(100-90) = 0,П рад*6,3°. Это значительная погрешность, которую в большинстве случаев необходимо учитывать. Источниками погрешности измерений разности фаз могут служить взаимные наводки во входных цепях или между каналами, например через цепь гетеродина. Под влияние наводки из образцового канала в измерительный попадает напряжение ы21, фазовый сдвиг которого относительно напряжения Ui в измерительном канале может быть произвольным. В наихудшем случае сдвиг между напряжениями составит 90°, что приведет к сдвигу суммарного напряжения на угол Дф = = aтctg(U/U\), которым и можно оценить погрешность. Подобным же образом может возникнуть погрешность и в опорном канале. Наводки особенно сильно проявляются, если измеряемое напряжение Ui<U2. Например, если Ut = \ мВ, [/2=1 В, а наводка в измерительный канал составит 10~[/2 = 0,1 мВ, то погрешность Дф = 5,7°. 10.2. ИЗМЕРЕНИЕ РАЗНОСТИ ФАЗ ПУТЕМ ЕЕ ПРЕОБРАЗОВАНИЯ ВО ВРЕМЕННОЙ ИНТЕРВАЛ Поскольку разность фаз сигналов является их временным параметром и характеризует временной сдвиг двух гармонических напряжений или периодических последовательностей импульсов, то естественно измерять разность фаз по временным интервалам согласно (10.1). Такой режим предусмотрен в некоторых современных цифровых микропроцессорных частотомерах. Основные соотношения. Измерение состоит из двух циклов. Сначала цифровым методом измеряют период повторения измерительного или опорного сигнала, например сигнала u\ (рис. 10.5): формируют импульсы «„ и «к и полученный интервал заполняют п счетными импульсами с периодом повторений Го. Измеренный интервал Т = пТо - Ан + Ак. Затем число п переписывают в ОЗУ микропроцессорной системы и устанавливают счетчик на нуль. По команде микропроцессорной системы измеритель переводят в режим измерений временного интервала и измеряют интервал Гх = тГо -А/н + Ак. Число т также переписывают в ОЗУ. Разность фаз ф = 3607/7?к m/и вычисляет микропроцессорная система. 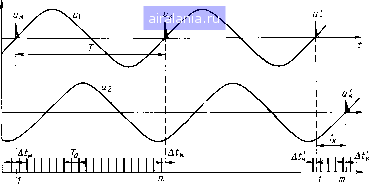 Рис. 10.5 Время однократного измерения в зависимости от продолжительности цикла записи в память может составлять два-три периода измерительного сигнала. В принципе измерения Г и 7" можно осуществить одновременно в двух независимых каналах с общим генератором счетных импульсов. Погрешности. Погрешности измерения разности фаз определяются в основном теми же причинами, что и погрешности измерений временных интервалов и периода повторения: долговременной нестабильностью кварцевого генератора, дискретностью измерений, влиянием шумов и дрейфа уровня формирования. Поскольку разность фаз измеряют косвенным образом, то перечисленные причины проявляются по-иному, чем при измерении периода и временных интервалов. Согласно (10.1), относительная систематическая погрешность измерения разности фаз где Qtx и 9г - систематические погрешности измерений периода Т и интервала Тх- В гл. 9 было показано, что относительные систематические погрешности измерений Т н Тх одинаковы и численно равны относительной долговременной нестабильности частоты б/о кварцевого генератора. Следовательно, погрешности компенсируются и 9ф = 0. Действительно, если, например, частота генератора несколько увеличится, то это приведет к пропорциональному увеличению чисел тип сосчитанных импульсов, а частное т/п не изменится. Рассмотрим погрешность дискретизации. Погрешности дискретизации Дд = Л/„ -Лк и ЛГд = Л/;; - Дк, измерений Т и Тх бу- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 [67] 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 0.007 |