
|
|
|
Главная -> Понятия метрологии 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 [79] 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 оценивают по числу П2, которое отображается на отсчетном устройстве HG. Погрешности. Погрешности измерений складываются из нескольких составляющих. Поскольку продолжительность интервала Т] кратна целому числу счетных импульсов, а начало интервала Т2 также совпадает со счетным импульсом, то погрешность дискретизации определяется единственным источником - погрешностью А/к конца интервала Т2. Эта погрешность характеризуется систематической составляющей То/2 и СКО а = = 7ол/12. Согласно (11.13) соответствуюшие погрешности измерений напряжения Qy= Uo/2n\, СКО ауд = (7o/«iV2- Основной способ уменьшения этой погрешности - увеличение времени интегрирования Т\ = п\То - можно реализовать увеличением постоянной времени RC. Однако конденсаторы большой емкости имеют худшие электрические параметры, а увеличение сопротивления эффективно до тех пор, пока оно сушественно меньше сопротивления утечек и их изменения проявляются мало. Интегрирование входного сигнала значительно ослабляет влияние помех на результат измерений. При гармонической помехе Ип= (Уп со5(а)п/ + ф) на входе накопленный конденсатором заряд за время Т\ г,/2 э = - [ (7пС05(ы„/4-ф)] dt = -{Ux-\- и„ С05ф j, Г,/2 " где Т„ - период помехи. Погрешность А(7„ = и„ созф 51пл7-/7-„ равна нулю при выполнении условия Ti = kT„, где k - целое число. Пусть ко входу интегратора кроме напряжения Ux подведено шумовое напряжение - эргодический случайный процесс с корреляционной функцией /(ш(т) = ашр(т), где Ощ - СКО шума, р(т) - нормированная корреляционная функция. Под действием шума приобретаемый конденсатором заряд изменится на что эквивалентно приращению Ux на I Аыш = u{t)dt. Если интервал Т\ намного больше максимального интервала корреляции случайного процесса Uiu{t), то СКО приращения о = aш(2тк/Гl) где Тк = ( р (т) dx - интервал корреляции. Отношение Ti/tk можно рассматривать как число слабо коррелированных измерений, которые можно выполнить на интервале Т\. Поэтому по своей структуре полученное соотношение подобно формуле для расчета СКО среднеарифметического результата независимых измерений. В чувствительных вольтметрах существенны погрешности за счет быстрых флуктуации уровня формирования компаратора и шумов усилителя. В отличие от большинства методов преобразования измеряемого параметра во временной интервал при методе двойного интегрирования результат не зависит от периода счетных импульсов То, поскольку период исключается при выводе соотношения (11.12). Однако необходима кратковременная стабильность То за время проведения измерений. Поскольку метод основан на интегрировании входного напряжения на интервале Т\=п\То, то, выбрав T\ = kT„, можно устранить влияние помехи нормального вида. Из-за нестабильности частоты напряжения питающей сети и частоты генератора счетных импульсов погрешность будет исключена не полностью. Поэтому в современных микропроцессорных вольтметрах частоту генератора счетных импульсов иногда подстраивают по частоте сети, сводя относительное значение разности частот до 10. В интегрирующих вольтметрах погрешности, связанные со смещением нуля в усилителях и интеграторе и с непостоянством коэффициентов передачи усилителей, корректируют при значениях образцовых напряжений (/о = (0,8...0,9)/к и t/o = 0. В микропроцессорных вольтметрах эта операция автоматизирована. Вольтметры с двойным интегрированием - наиболее распространенные типы приборов, их основная погрешность составляет 5-10...2-10\ Микропроцессорный интегрирующий вольтметр с частичным разрядом конденсатора. Возможная структурная схема АЦП микропроцессорного вольтметра показана на рис. 11.19, а. Входное напряжение Ux подводят ко входу интегратора с помощью ключа SA1, замыкаемого микропроцессорным управляющим устройством. Момент замыкания соответствует одному из счетных импульсов, вырабатываемых имеющимся в микропроцессорной системе генератором тактовых импульсов. Время замыкания ключа Т\, в течение которого интегрируют входной сигнал, равно целому числу счетных импульсов (рис. 11.19, б). Состояние клю- чей, в том числе и 5А1, отражено на рис. 11.19, б. Замкнутому состоянию соответствует высокий уровень напряжения. За время интегрирования емкость периодически частично разряжают, подключая с помощью ключа SA2 образцовое напряжение - Uo отрицательной полярности. Ключ замыкают по сигналу с управляющего устройства в тот момент, когда напряжение интегратора и„ достигнет порогового уровня -Unu это состояние фиксируют компаратором К2. Продолжительность разряда Tl равна целому числу периодов счетны.х импульсов. За время интегрирования Т\ проводят несколько циклов разряда. Последний цикл может совпасть с окончанием интервала Т\ интегрирования входного напряжения. В этом случае скорость разряда в конце последнего интервала Т2 разряда скачкообразно 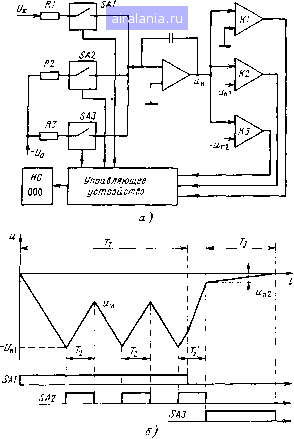 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 [79] 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 0.0073 |