
|
|
|
Главная -> Дистанционное зондирование 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 [118] 119 120 121 122 123 124 125 126 127 128 129 Схемах не всегда правильно понимается. Если анализ необхО димо выполнять главным образом методами, предусмотренными для работы с изображениями, в первую очередь следует принимать во внимание пространственное разрешение, так как в данном случае оно является основным источником информации. С его помощью мы можем зрительно различить пространственную структуру сцены и извлечь из нее много информации. Однако если анализ должен основываться на многоспектральных данных, пространственное разрешение сцены играет совсем другую роль. С его помощью определяют, какие информационные классы можно использовать непосредственно с данным множеством данных. Например, если данные собраны о городе с мгновенным полем зрения, дающим разрешение 100 м, их можно точно разбить на такие классы, как промышленные, коммерческие, жилые и т. д. При разрешении 1 м информационные классы могут быть такие: трава, деревья, крыши, бетон и т. д., т. е. они являются составной частью информационных классов со 100-метровым разрешением. Таким образом, поскольку мы располагаем современными методами многоспектраль- ной обработки, вопрос о разрешении зависит в основном от того, какие информационные классы необходимы. Что касается методов машинной обработки, то если разрешение более высокое, будет получено больше деталей о пространственной структуре сцены. Однако в современных алгоритмах функционального машинного анализа эта характеристика еще недостаточно полно используется; мы вернемся к этому вопросу при рассмотрении новых алгоритмов обработки. Важны и представляют интерес и другие пространственные характеристики. Очевидно, важным моментом является выбор пространственного шага квантования. Например, если выбрать шаг квантования, при котором происходит значительное перекрытие элементов изображения, то можно повлиять на соответствие между мгновенным полем зрения и шагом квантования. Во всяком случае, ясно, что пространственное разрешение и детали относятся к списку основных параметров. Спектральное разрешение и детали. Обратимся к схеме спектрального квантования. Мы знаем, что распределение энергии как функции длины волны может помочь нам в получении большого объема информации, и поэтому пространственное разрешение и схема спектрального квантования - это< несомненно основные характеристики системы. Самая простая схема, которая используется при конструировании датчика,- это выбор отдельных «спектральных окон» для обзора сцены. Но как много надо таких окон? Обычно сбор данных производится в большом числе спектральных диапазонов, но для любой конкретной задачи анализа используется только подмножество специально отобранных каналов. На первый взгляд, это кажется ненужным. Но мы уже убедились в том, что существенная размерность типичных мно- госпектральных данных может быть намного меньше действительного числа спектральных диапазонов. Причина этого недостатка заключается-в том, что современные сканерные системы недостаточно точно характеризуют информацию, содержащуюся в получаемых ими данных о сцене. Квантование гладкой кривой (фактический, спектральный отклик в зависимости от функции длины волны для данного элемента изображения) и неперекрываюшихся полосовых функций сравнительно прямоугольной формы (функций отклика спектральных каналов сканера) не может дать достаточно полного представления информации о гладкой кривой, если нет относительно большого числа таких совсем узких функций окна. Рассмотрим обобщенную математическую модель данной ситуации. Задача приемника в системе распознавания образов состоит в оценке функции спектрального отклика «неизвестного» объекта и сообщении результата классификатору в форме множества чисел. В данном случае «неизвестный» объект определяется функцией спектрального отклика, обозначенной R{K). Это можно записать в виде R (Я) = (К) + сФ, W + ... + с„ф„ (Я) = 2 СпФ„ (Я). (VI1.1) функции •{ фп(А,) \ п=1,2, Л называются базисными функциями, и выбранное множество используется для представления каждой функции спектрального отклика. Они полностью определяются конструкцией сканера и, как мы указывали выше, для современных сканеров обычно представляют собой серию неперекрывающихся функций окна, т. е. функций, которые везде, кроме полосы пропускания, равны нулю. Коэффициенты {Сп} содержат результаты измерений неизвестной функции R{K), т. е. если дано множество базисных функций фп 1", коэффициенты зависят только от /?(Х.) и поэтому служат источником информации о R{k) для классификатора. Тогда все, что нам необходимо сделать, это построить множество \ (рп\ таким образом, чтобы для любой различной функции RCk) иметь в результате соответствующее различное множество коэффициентов {с,,}. Фактически мы можем гарантировать лишь то, что множество {с„} содержит всю информацию, которая содержалась в R{K), если можно точно восстановить R{X) по данным {сп}. Это свойство называется полнотой*. Причина необходимости использования большого числа спектральных каналов для сбора данных и затем различных подмножеств для отдельных видов анализа заключается в том, что даже современные сканерные системы на борту самолетов, * Такая трактовка свойства полноты представляет собой очень упрощенный взгляд на теорию ортогональных функций прн применении ее к сигналам. Читатель, интересующийся математикой, вероятно, захочет более подробно разобраться в теории [7]. которые обычно имеют больше каналов, чем современные системы на борту спутников, не обладают свойством полноты. И степень точности восстановления функции спектрального отклика по данным современных сканеров на борту спутника, очень небольшая. Базисные функции у? Г"Г1----i 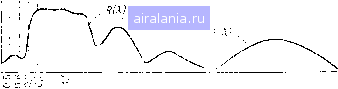 Отраэкательный  R(X)ZCr,fn(Л) Тепловой --, 1---- Длина волны, Я O-.kv) Рис. VII.14. Аппроксимация типичной функции спектрального отклика зеленой растительности, используемая в Ландсат В случае многоспектральных сканеров Ландсат 1 и Ландсат 2 базисные функции представляли собой серию четырех окон. На рис. Vn.l4 показана типичная функция спектрального отклика растительности, множество четырех базисных функций многоспектрального сканера* и аппроксимация кривой отклика растительности, которую можно получить с его помощью. Ясно, что многоспектральный сканер на борту Ландсат не передавал системе обработки всю информацию, содержащуюся в сцене. Наше умение разрабатывать сканеры с оптимальными базисными функциями во многом зависит от умения проектировать и конструировать сканеры 1) с достаточным числом каналов и 2) с чувствительностью детектора как функцией длины волны и возможностью ее построения для каждого канала по характеристикам, получаемым математически. Подробное рассмотрение этой проблемы выходит за рамки нашей книги, но в этой связи можно заметить, что одним из критериев потенциальной возможности дальнейшего развития многоспектральных систем * В действительности базисные функции многоспектрального сканера Ландсат не четко прямоугольной формы, а несколько округлые, и охватывают примерно четыре изображенные области. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 [118] 119 120 121 122 123 124 125 126 127 128 129 0.0027 |