
|
|
|
Главная -> Дистанционное зондирование 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 [31] 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129  Направление движения Воспроизведение  Ветер Дорога Съемка .Рис. 11.53. Влияние вариаций в положении самолета: .а -эффект тангажа, б - эффект высоты полета, jb - эффект рысканья {16\   Рис. 11.54. Результирующая область охвата Земли сканером при различных нарушениях ориентации самолета: а - теоретическое неискаженное изображение, б - тангаж, в - линейное изменение скорости, г ~ крен, д - линейное изменение крена, е - рыскание, ж - линейное изменение рысканья, з - высота, и - линейное изменение высоты, к - линейное изменение тангажа или скорости \16]  бражение показано на рис. 11.54. Математическая формулировка, описывающая эти изменения в изображении, достаточно сложна и здесь рассматриваться не будет. Однако результаты математических формулировок приведены в графической форме на рис. 11.55-11.58. Заметим, что отклонения от идеального изображения монотонно увеличиваются при увеличении переменных каждого из изменений. В большинстве самолетных сканирующих систем эффекты крена компенсируются электронным регулированием начала каждой строки сканирования в окончательных изображениях. Однако искажения, обусловленные тан-гажом и рысканьем, обычно не компенсируются. Изменения, вызванные тангажом, часто маскируются из-за перекрытия соседних строк сканирования в изображениях сканера. Однако искажения, обусловленные рысканьем, обычно присутствуют в изображениях, если только сканер не установлен на стабилизированную платформу самолета. В спутниковых изображениях эти параметры тщательно контролируются и не вызывают серь-,€зных затруднений. .100 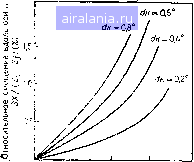 12,2 (40) 20 40 60 Угол сканирования в (°) Рис. 11.55. Смещение вдоль оси X на местности, обусловленное изменением рысканья (йф) [16\ oZe = l2,2M(40 футов) с/2с = 9,1м(30футов) / dZc = 6,lM (20 футов) dZc = 3,0M футов) 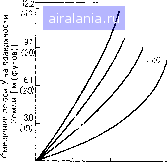 20 40 60 Угол сканирования 9 (°) Рис. 11.57. Смещение вдоль оси Y на местности, обусловленное изменением высоты полета (Zc-Z;) = 3,05km (10 ООО Футов) (Zc-Z;) 1.52км (5000 футов) (Zc-Zj)= 0,76 км футов) 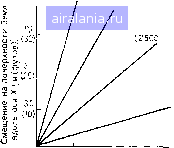 (2c-Zy) = 0,3lKM (1000 футов) 0,2 0,4 0,6 Изменение тангажа dtpC) Рис. 11.56. Смещение вдоль оси X на местности, обусловленное изменением тангажа (d(p) [16]
20 40 60 Угол сканирования б (") Рис. 11.58. Смещение вдоль оси Y на честности, обусловленное изменением •срена (da) [16] Фотографические системы Часто фотографические системы считаются родоначальниками систем дистанционного зондирования благодаря тому, что технология дистанционного зондирования по существу возникла в науке как интерпретация фотографий. Действительно, многие характеристики системы дистанционного зондирования, использующей многоспектральный сканер, одновременно встречаются в оптических и, в некоторой степени, детекторных узлах фотографической системыДВ фотографической системе пленка выступает в роли детектора, а объективы, фокусирующие изображение на плоскости пленки, - в роли оптической системы. Фотографическая система - кадровая система: все данные об изображении получаются одновременно. Пленка, используемая в фотографической системе как детектор, по сравнению с много- Оптическая ось 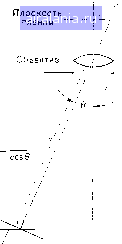 Проектируемый элемент разрешения сцены,изоб-- ражение на фотопленке, площадь = /lCos8 Площадь апертуры Да Расстояние dот элемента разрешения Сцены до объектива Н Высота камеры над поверхностью Земли(Hj спектральной сканерной системой имеет дополнительное ограничение, а именно, относительно ограниченный спектральный диапазон Однако по сравнению с многоспектральньщи сканер-ными системами фотографические системы характеризуются очень высоким пространственным разрешением Как уже было; отмечено в гл. I, дешифрирование как наука о классификации и анализе фотографических изображений - это хорошо развитая технология.,Так же хорошо развита фотограмметрия, подчеркиваюшая геометрические аспекты, иногда называемые метрическими, в анализе изображений.. Эта высоко развитая технология, а также относительно низкая стоимость фотографических систем по сравнению с многоспектральными сканерными системами способствует широкому использованию ее в дистанционном зондировании. Оптическая система. Оптическая часть фотографической системы предназначена для формирования покадрового изображения, и поэтому ее поле зрения относительно большое по сравнению с мгновенным полем зрения построчнопря-молинейного сканера. Поле зрения некоторых фотографических систем может достигнуть 80° и больше. Хотя для вьшолнения приближенных вычислений, касающихся оптики фотографической системы, могут быть применены формулы, используемые для системы простого объектива, описанного в разд. П.З, фактически используемые объективы состоят из множества элементов, поэтому точные определения поля зрения и пределов разрешения довольно-сложны и обычно выполняются на цифровых ЭВМ [17]. Однако некоторые простые геометрические эффекты в системах фотографических объективов могут стать понятными из рис. 11.59. Предположим, например, что камера предназначена для, получения изображения размером 0,23X0,23 м. Желательно, чтобы поле зрения было 60°, тогда, используя уравнение на рис. И.Юр, делаем вывод, что для получения на пленке изображения такого формата нужен объектив с фокусным расстоянием 0,20 м. Эти вычисления предполагают ровную плоскость пленки. В действительности плоскость пленки, высококачественных аэрофото-102 ,Проектируемая площадь = Ag cos в Площадь элемента на местности Ag Рис. 11.59. Угловая зависимость простой фотографической системе 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 [31] 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 0.0089 | |||||||||||||