
|
|
|
Главная -> Дистанционное зондирование 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 [45] 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 бор п измерений, каждое из которых относится к одному из каналов сканера. Предполагается, конечно, что п измерений одного элемента разрешения земной поверхности делаются од-HOjBpeMeHHj). Как отмечалось в гл. I, принято изображать п измерений одной точкой в л-мерном пространстве, называемом пространством измерений. Любая точка в пространстве измерений может быть представлена /г-компонентным вектором измерений X, где Xi соответствует t-му измерению (измерению в t-й зоне спектра или канале сканера) для данного элемента разреше-" , , 1 Естес- Рецептор (датчик) Классификатор (блок принятия решения) Результат Рис. II 1.1. Модель системы распознавания образов ния на земле*. Блок принятия решения, или классификатор, на рис. П1.1 относит вектор измерений к одному из множеств предварительно определенных классов в соответствии с подходящим классификационным правилом. Одна из целей данной главы - описание классификационного правила, обычно используемого при распознавании образов в дистанционных исследованиях. III.2. Геометрическая интерпретация распознавания образов, дискриминантные функции Как было отмечено ранее, вектор из п измерений, получаемых многоспектральным сканером для каждого элемента разрешения на Земле, может быть представлен точкой л-мерного пространства. Несколько примеров приведено на рис. П1.2 для случая л = 2. (Многие понятия этой главы иллюстрируются двухмерными примерами. Все они могут быть обобщены для пространств измерений произвольной размерности.) Когда представляется несколько таких векторов измерений, условно относящихся к одному типу покрытия земной поверхности, но полученных для различных точек Земли, весьма вероятно, что они расположатся скорее в виде локализованного * В данной главе прописными буквами будут обозначаться векторы, а строчными - отдельные измерения. Часто эти отдельные измерения будут компонентами векторов. кластера, или оолака точек (рис. 111.3), а не в виде одной точки. Это явление, свойственное для данных дистанционных исследований, является результатом присущих природе случайностей, т. е. случайных изменений в положении листьев растительности, атмосферных условий и даже «щума» аппаратуры дистанционного зондирования. И все же кластеры, относящиеся к определенным типам земного покрытия, обычно более или • Растительность Почвз Вода Растительность Почва вода Puc.fll.2. Данные в двухмерном про- Рис. III.3. Кластеры точек данных странстве менее различимы, и в таких случаях возможно связать локализованные области пространства измерений с конкретными типами земного покрытия. Говорят, что такие типы земного покрытия разделимы, все остальные - неразделимы. Задача проектирования классификатора образов состоит вначале из разбиения соответствующим образом пространства измерений на области рещения так, чтобы каждая область относилась к данному различимому классу (рис. П1.4), и затем из создания такого классификатора, который может отождествлять любой вектор измерений как принадлежащий к классу, соответствующему той области рещения, в которую он попадет. Первая часть этой задачи зачастую оказывается гораздо более трудной, чем это можно предположить по относительно простому случаю, представленному на рис. П1.4, поскольку часто образы, относящиеся к исследуемым классам, несколько перекрываются. Показать, как мы можем эффективно поступать в подобных ситуациях, и есть основная .задача этой главы. Но фактически процесс построения классификатора довольно прост, и мы воспользуемся этим обстоятельством для краткого его описания. Предположим, что имеем т классов и определены соответствующие этим классам области рещения. Пусть мы можем найти множество функций X, называемых дискриминантными функциями*, которые будем обозначать g\{X), g2{X), gm{X), об- * В литературе часто употребляют также термины «решающие функции», «разделяющие функции». - Прим. пер. ладающими тем свойством, что gi{X) имеет большее значение, чем все остальные дискриминантные функции, всякий раз, когда - точка в t-й области решения (позже мы покажем метод границы jii}-решения Класс!  Класс 2 Класс 3 Рис. III.4. Области и границы реше- 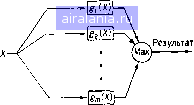 Рис. III.5. Классификатор образов, определенный через дискриминантные функции определения таких функций). Далее, если мы хотим классифицировать любую точку Хи, т. е. определить, к какой области решения она относится, то все, что нам надо сделать, - вычислить величины gi{Xu), g2{Xu), .... gm{Xu). Точка Хи принадлежит к классу, имеющему наибольшее значение дискрими нантной функции g. После определения дискриминантные функции могут быть использованы для построения классификатора, как показано схематично на рис. П1.5. Формально мы имеем следующее: Правило классификации. Пусть со,- обозначает t-й класс. Решаем, что Хац, если и только если gi{X)gj{X) для всех 2, т. (Читается так: решаем, что X принадлежит к классу i тогда и только тогда, когда gi{X) больше или равно gi{X) для всех классов /=1, 2, т). Действительно, две дискриминантные функции могут иметь равные значения только в точках, лежащих на границах между областями решения. Для этих случаев должно быть определено правило разрешения неопределенности. В качестве простого примера обсудим ситуацию, изображенную на рис. П1.6. Предположим, нам известно, что область, лежащая ниже прямой х\-А-Х2-2 = 0, соответствует классу 1, а 144 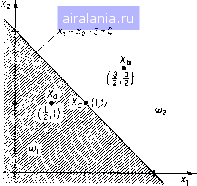 Рис. III.6. простой пример, иллюстрирующий дискриминантные функции 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 [45] 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 0.0072 |