
|
|
|
Главная -> Дистанционное зондирование 0 1 2 3 4 5 6 [7] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 данных, так как иногда, например, желательно провести анализ множества данных, часть которых собрана в разное время (т. е. необходим многовременной набор данных). Хранение данных также потребуется после анализа и перед использованием информации, в основном для промежуточной информации, чтобы результаты анализа можно было использовать по мере необходимости, а не только в момент ее получения. Аналогично, хранение данных после анализа необходимо при сравнении результатов различных видов анализа, например, при контроле изменений в землепользовании. Системы данных рассмотрены в гл. IV. Важно помнить, что ориентированные на число системы дистанционного зондирования, связанные с обработкой на ЭВМ, не следует рассматривать как автоматические, которые сводят участие человека только к функциям контроля и эксплуатации. Действительно, интерактивное взаимодействие в процессах и предварительной обработки, и анализа оказалось во многих •случаях необходимым для удовлетворения требований точности и стоимости, предъявляемых к таким системам. Участие человека, конечно, абсолютно необходимо на этапах использования как информации, так и дополнительных данных. Эффективное применение имеющихся дополнительных данных, эффективное участие в процессе обработки и эффективное использование результатов требуют понимания части системы, находящейся перед датчиком, т. е. сцены. Этот достаточно сложный вопрос рассмотрен в гл. V. Полезно рассматривать потребителя информации не просто как пользователя данных вывода информационной системы, но Л как часть всей системы. Это удобно с той точки зрения, что подчеркивает важность соображений пользователя при проектировании системы. Требования пользователя отражаются на всей системе вплоть до конструкции датчика так же как и требования алгоритмов анализа; и то, и другое должно быть серьезно принято в расчет проектировщиком системы и оператором. Приложения, описанные в гл. VI, наглядно демонстрируют этот факт. В гл. VII приведен заключительный обзор по вопросу извлечения информации из данных дистанционных измерений методами, ориентированными на число. Задачи Какое влияние иа дистанционное зондирование оказали цифровые ЭВМ и распознавание образов? 1.2. Каковы три типа изменений, которые содержат информацию в систе-.мах дистанционного зондирования? Приведите пример каждого типа изменений. 1.3. На рис. 1.,19 Я1 - относительная отражательная способность в первом диапазоне длин волн, Лг - во втором. Данные, представляющие классы 1, 2 и 3, представлены в пространстве Xi, Я2. а). Объясните, почему имеется изменчивость в данных, связанных с любым из классов. 1* Класс! дКласс2 X Класс 3 Отклик на Л] Рис. 1.19. 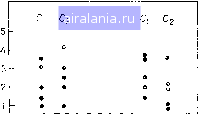 Диапазон 1 Рис. 1.20. Диапазон 2 С). Основываясь на исходных данных, проведите границы решения, которые разделят пространство Xi, Яз на непересекающиеся области. 1.4. Для каждого из двух типов покрытия - d и Cz проведено пять измерений в каждом из двух спектральных каналов (табл. 1.1). На рис. 1.20 дан один способ представления данных в графической форме. Это наглядное представление свидетельствует о том, что между двумя типами покрытия нельзя провести различии ни в одном из спектральных каналов. (Изображения двух типов покрытия показывают почти одинаковые значения градаций яркости.) Представляя данные в многомерном пространстве, покажите, что два множества данных могут быть разделены линейной границей решения (прямой линией). Таблица 1.1 Тип покрытия
1.5. Набросайте схему и сделайте надписи, которые помогут Вам при объяснении основных компонент системы дистанционного зондирования. Список литературы 1. Fischer W. А. History of Remote Sensing, in R. G. Reeves (Ed.). «Na-nual of Remote Sensing», American Society of Photogrammetry, Falle Church, Va., 1975. 2. Colwell R. N. (Ed.) Manual of Photographic Interpretation, American Society of Photogrammetry, Washington, D.C., 1960. 3. Smith J. Т., Jr. (Ed.) Manual of Color Aerial Photography. American Society of Photogrammetry, Falls Church, Va., 1968. 4. Nilsson N. J. Learning Machines*. McGraw-Hill Book Company, New-York, 1965. * Нильсон H. Обучающиеся машины. М., Мир, 1967. (Прим. пер.) 5. Fukunaga К. Introduction to Statistical Pattern Recognition*, Academic Press, New Yorl<, 1972. 6. National Aeronautics and Space Administration: «Advanced Scanners and Imaging Systems for Earth Observations*, NASA, Washington, D. C, 1973. 7. Landgrebe D. A. Systems Approach to the Use of Remote Sensing, Proc. International Worlcshop on Earth Resources Survey Systems. NASA, Ann Arbor, Mich. NASA Special Publication SP-283, vol. I, p. 139-144, 1971. 8. Laboratory for Agricultural Remote Sensing: «Remote Multispectral Sensing in Agriculture*, vol. 3, Research Bulletin no. 844, Agricultural Experiment Station. Purdue University, West Lafayette, Ind., 1968. * Фуканага К. Введение в статистическую теорию образов распознавания. М., Гл. ред. физ.-мат. лит., 1979. (Прим. пер.). 0 1 2 3 4 5 6 [7] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 0.01 | ||||||||||||||||||||||||||||||||||||||||||||||||||