
|
|
|
Главная -> Операционные усилители 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 [81] 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 , Разность фаз «8ых/Ивыхид 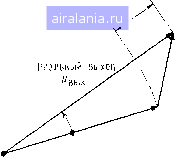 Вентерная разность ВЫХда.йд Идеальный выход вых ид Рис. 8 2. Векторная диаграмма, иллюстрирующая связь между векторной, амплитудной и фазовой ошибками к НИМ относятся, например, сосгавные операционные схемы с несколькими операционными усилителями (аналоговые вычислительные машины, модели, имитаторы, тренажеры), измерительные усилители, усилители выборки - хранения, перемножители, умножающие цифро-аналоговые преобразователи и т. д. Амплитудная погрешность ел линейной операционной схемы является относительной разностью амплитуд действительной и идеальной выходных величин ел =(1 "вых I -I «вых.ид )/ «ВЫХ.ид 1=1 G/G„„ I - 1. (8.26) Амплитудная погрешность является решающей в оценке точности таких операционных схем, которые работают с синусоидальными сигналами, полностью характеризующимися их амплитудой (это усилители переменного тока, а иногда и активные фильтры). Фазовая погрешность ф линейной операционной схемы есть разность фаз действительной и идеальной выходных величин 9=arg («вых/«вых.ид) =arg (G/GJ. (8.2в) Практическое значение фазовой погрешности вызывает сомнение. Сама по себе она не имеет отношения к точности операционной схемы в смысле отклонения выходного сигнала от иде- Векторная погрешность ev линейной операционной схемы является относительной векторной разностью действительной и идеальной выходных величин «вых -«вых.ид / "вых.ид I =10/С„д- 11. (8.2а) Векторная погрешность является основной характеристикой точности операционных схем, которые оперируют с мгновенными значениями сигналов. Такие схемы широко используются, и Амплитудная разность 1"вых1- "вых ид1 альной величины. Хотя термин «фазовая погрешность» и является общепринятым [1, с. 79, 99], однако чаше всего он используется в значении векторной погрешности [уравнение (8.2а)]. Эта путаница возникает вследствие совпадения в некоторых (хотя и частых) случаях фазовой и векторной погрешностей. До сих пор это было всего лишь вопросом терминологии. Однако при полной замене векторной погрешности уравнением (8.2в) могут возникать большие ошибки, как это произошло, например, в работе [2]. Чтобы исключить какую бы то ни было возможность неправильного понимания, мы не будем использовать в этой книге понятия фазовой погрешности. Там, где мы все же будем к нему обращаться, это будет сделано исключительно для подтверждения вышесказанного. Статическая погрешность во линейной операционной схемы есть относительная погрешность коэффициента усиления с обратной связью по постоянному току Ч = [G т -Онд (/0)1/О„д (/0)=G (/0)Яд (/0) -1. (8.2г) Статическая погрешность является показателем номинальной точности коэффициента усиления резистивной операционной схемы с обратной связью. Она равна величине амплитудной погрешности на постоянном токе so = 8a(0), а ее абсолютная величина равна векторной погрешности на нулевой частоте 8о = = 8v(0). Чтобы внести ясность в суть различия между векторной и амплитудной погрешностями, полезно использовать представление сигнала в виде функции времени (рис. 8.3). Смешение векторной и амплитудной погрешностей приводит иногда к неправильному пониманию (см., например, работы [3] и [4]). На рис. 8.3 через «вых. ид (О обозначена идеальная, а через Ивых (О-действительная форма выходного сигнала. Если их рассматривать отдельно, то можно видеть только различие в их амплитуде, что составляет суть амплитудной погрешности ел-Сопоставление мгновенных значений обоих сигналов (действительного и идеального) показывает, что величина, на которую они отличаются друг от друга, будет различной в зависимости от момента сравнения. Модуль отклонения мгновенного значения реального сигнала от идеального (расчетного) значения изменяется от нуля до некоторой максимальной величины, равной модулю векторной разности, которая и есть векторная по- > Естественно, это не означает, что фаза не влияет на векторную погрешность. Однако в тех случаях, когда фазовая погрешность имеет сколь бы то ни было значительную величину, она совпадает с векторной погрешностью (из-за нее и возникает в этих случаях последняя) и введение нового термина для одного и того же явления не имеет смысла. грешность 8т. Полученное различие обоих сигналов в свою очередь представляет собой синусоиду, отражающую временной ход вектора «вых-«вых. ид- Ограничив рассмотрение небольшими погрешностями и пренебрегая различием амплитуд, мы будем наблюдать наибольшее отклонение вблизи перехода через нуль, где возможна линеаризация: «вых. ид (if) ={/выха)г?, «вых(0 = вых(со/-(-ф). Модуль векторной разности просто равен Ивых-«вых.ид = /выхф! (сигналы на рисунке показаны так, что эта фаза отрицательна) и векторная погрешность равна фазовой погрешности: 8у = Амплит\/дная разность Реальный сигнал Время 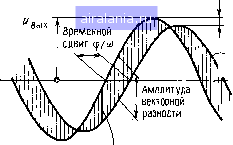 Мгновенное отклонение \. Идеальный сигнал вых.ид (f) Рис. 8.3. Иллюстрация соотношения между векторной, амплитудной и фазовой ошибками при представлении сигнала в виде функции времени. = /выхф вых= ф1. Дадим численную оценку этого равенства: векторной погрешности 8у = 0,0001 = 0,01 % соответствует фазовая погрешность ф =0,0001 радиан = 0,0057°. Более подробно связь между этими двумя видами погрешностей будет показана в следующем разделе. 8.1.2. Динамические погрешности апериодического звена первого порядка Прежде чем начать анализ частных причин, вызывающих погрешности, рассмотрим динамические погрешности операционной схемы, у которой выражение для нормализованного коэффициента усиления с обратной связью имеет вид G/G„„(/f) = l/(l-f/f J, (8.3) Что соответствует передаточной функции апериодического (инерционного) звена первого порядка. Нас не интересует частотная зависимость идеального коэффициента усиления с обратной связью Сид. Будем рассматривать только те искажения, которые вносят реальные свойства 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 [81] 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 0.0038 |