
|
|
|
Главная -> Операционные усилители 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 [87] 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 не дать векторной погрешности выйти за пределы 0,01%, петлевое усиление рЛ должно быть соответственно не меньше 80 дБ. Заштрихованная на графике область показывает (Зыашзон полезных частот операционной схемы, в котором векторная погрешность ev не превышает определенной величины {гу)м- 2. В случае операционной схемы первого порядка частотная характеристика коэффициента погрешности имеет тот же вид. Пб i. Дополнительное петлевое усиление 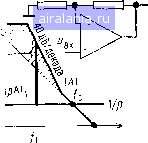 Рис 8 15. График, показывающий, что увеличение крутизны спкДа амплитуд-ио частотной характеристики ОУ на средних частотах увеличивает петлевое усиление \А\ и тем самым уменьшает векторную погрешность Вк*, при этом, однако, увеличивается и время установления что и характеристика апериодического (инерционного) звена первого порядка, рЛ/(1-(-рЛ) = l/(l-(-/f/fc), и уравнения (8.20а), (8.206) совпадают с уравнениями (8.5а), (8.56) при подстановке в последние /с вместо f. (8.21а) (8.216) Вывод 1 представляет собой не что иное, как вывод 1 разд. 8.1.2, сформулированный в терминах частотного представления сигналов. 3. Векторная погрешность 8ir=l/IMI объединяет в одном аналитическом выражении как составляющую по постоянному току 1/РоЛо, так и частотно-зависимую составляющую f/fc, демонстрируя тем самым включение статической погрешности в динамическую при расширенном толковании последней. 4. Приближенные соотношения (8.22а) 8=1/рЛ /е, -ед=Ке1/рЛ + 1/2рЛ (8.226) ПОЗВОЛЯЮТ быстро оценить возможные динамические погрешности любой операционной схемы. Для этого необходим всего один параметр -сопрягающая частота fc, которую можно приближенно определить путем измерений или же взяв приводимое в спецификациях на ОУ значение частоты на уровне -3 дБ f-z ДБ- Тщательное измерение частотной зависимости рЛ может лишь дополнительно улучшить эту оценку. Однако возникает вопрос, не лучше ли получить частотную зависимость динамических погрешностей прямым измерением. 9к0м 7PV при £у<0,Г/о Диапазон полезных час-1 кГц ШГц 1д/ ЮМГц ЮнОм ЮнФ 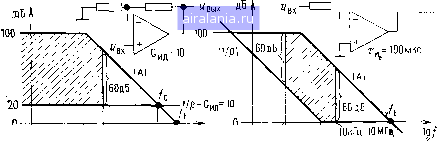 /и =1,6 кГц Диапазон полезных частот при £у<0,1°/ Рис. 8.16. Полоса частот неинвертирующего усилителя (а) и интегратора (б) при максимально допустимой векторной погрешности (8v)m = 0,1%. Так как частоту единичного усиления операционного усилителя нельзя увеличивать слишком сильно без риска нарушить устойчивость схемы, то напрашивается другая возможность расширения полосы полезных частот - за счет увеличения петлевого усиления путем увеличения крутизны спада амплитудной характеристики \А\ (рис. 8.15). Однако, как мы увидим в гл. 9, полученная таким образом частотная характеристика операционного усилителя не согласуется с требованием быстрого установления выхода при импульсном возбуждении. Поэтому данный прием используется в широкополосных усилителях, но не годится для усилителей с быстрым установлением. Излом амплитудно-частотной характеристики ОУ проявляется также на частотной характеристике \G\ в виде резонансного максимума (см. разд. 7.4.4.). Возникает вопрос, не противоречит ли этот факт выводу 1 от-иосительно ого, что векторная погрешность не зависит от формы частотной .характеристики ЗА. Противоречия здесь нет, поскольку резонансный максимум, входящий в уравнение (8.19) через знаменатель 11--1/рЛ, наблюдается вблизи сопрягающей частоты /с. Говорить здесь о динамической noj грешности бессмысленно, так как операционная схема уже утратила свой детерми-чированный характер; подробнее об этом будет сказано в гл. 13. (8.25) Существенность прямого прохождения сигнала в диапазоне полезных частот интегратора зависит от значения частоты fx-Введенная ранее частота положительного нуля fz [см. уравнение (7.39)] представляет собой среднее геометрическое частоты fx и частоты единичного усиления ft. В качестве иллюстрации к сказанному на рис. 8.16 показана ситуация, соответствующая двум операционным схемам, описанным в разд. 7.4.1 и 7.4.3. Неинвертирующий усилитель с коэффициентом усиления Сид=10 (рис. 8.16,а), выполненный на операционном усилителе с Ло = 100 000 и /г = 10 МГц, может работать с векторной погрешностью 8у<:0,1% в диапазоне частот до 1 кГц. Тот же ОУ, включенный по схеме интегратора с постоянной времени Ти=100 мкс (рис. 8.16,6), интегрирует с векторной погрешностью 8у<0,1% сигналы частотой от 16 Гц до 10 кГц. Для того чтобы эта схема действительно работала с такой точностью, нужно, чтобы характеристическая частота /и = = 1/2лГи не превышала 8у/г = /г/1 000= 10 кГц. 8.3.2. Погрешность за счет прямого прохождения сигнала Важность учета прямого прохождения сигнала в оценке динамических погрешностей проще всего показать, продолжив рассмотрение предыдущего случая. Как будет показано, необходимо рассматривать только векторную погрешность. Пусть нормализованный коэффициент усиления с обратной связью имеет вид G/G„„ = (l +С„/рЛО„д) [рЛ/(1 -f рЛ)]==(рЛ-Ь0„/Сад)/(1 -ЬРЛ)- (8.23) Отсюда 8у = (1/1М1)11-Оо/С„д при рЛ1» 1. (8.24) Сравнение с уравнением (8.20а) показывает, что поправку в полученные ранее результаты можно ввести простым умножением первичной погрешности 8у=1/рЛ на коэффициент 1- - Со/Сид. Динамическая погрешность за счет прямого прохождения сигнала становится заметной только тогда, когда коэффициент прямой передачи Gq сравним с величиной идеального коэффициента усиления с обратной связью 0„д. Так как величина Go всегда меньше 1, то имеет место всего один случай практического значения - это быстрый интегратор (рис. 8.17). Из разд. 7.4.5 имеем G„« = -У/7, 1/р= 1-f/?вых ?1+/„ 7, Go = p?Bbix ?i=(/f/W/[l+/7(l/fH+l/f.)], так что 1 Go/G==(l -f/Ш (1 -i-jf/fM 1 -f/f (l/f„.f 1/fJ],) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 [87] 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 0.0102 |