
|
|
|
Главная -> Операционные усилители 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 [88] 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 Ао=100дБ /,2= =0,16 Гц 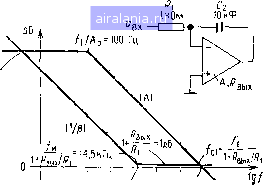 вых> V ЫГк 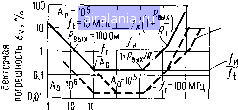 10 1к Шн ЮОк 1М ШМ, Частота /, Гц Рис. 8.17. Влияние прямого прохождения сигнаиа на векторную? погрешность. быстрого интегратора. На низких и средних частотах векторная погрешность определяется частотными характеристиками а \А\. На высоких частотах, при / > f; (1 + Я,ых/)> добавляется влияние прямого прохождения сигнала. При указанных на схеме значениях R, н Cj и при ОУ, имеющем /о=100 дБ, f,= lO МГц и м. f=I/2nCj«, = 16 кГ1 и ;-1/2яады-160 кГц. В типичном медленном интеграторе (рис. 7.23, а) частота /j;=l,6 кГц на четыре порядка превышает характеристическую-частоту /и и не оказывает никакого влияния на работу схемы. В быстром интеграторе (рис. 7.23,6) частота f; = 160 кГц. попадает в представляющий интерес диапазон частот, поскольку она лишь незначительно выше частоты /и. С учетом соотношения l/A = l/Ao-\-jf/fx и уравнения (8.25) результирующая векторная погрешность [уравнение (8.24)] приобретает вид vlfJifAo+fJft+ifi +R.uM/ft+iifmt . (8.26) На асимптотическом графике этого выражения, показанном на рис. 8.17, выделяются четыре участка. Ниже частоты ft/Aiy векторная погрешность увеличивается в результате приближения к нижней сопрягающей частоте fc2 = UIAu- На участке меж- 8.3.4. Компенсация динамических погрешностей Основное внимание здесь будет уделено компенсации векторных погрешностей, вызванных паразитными явлениями в це-ши обратной связи, но вместе с тем мы коснемся также погреш-шостей, связанных с операционным усилителем. =- Так как у ОУ еЛТ-входш знанителька входная емкесть. -Дрим фед. ду fiMo И/H/(l+i?Bbix/i?i) графики 1/р и \А\ идут параллельно и векторная погрешность остается постоянной и равной fulft-Выше частоты /и/ l-f-?Bbix/i?i) векторная погрешность снова увеличивается вследствие приближения к верхней сопрягаюшей частоте /ci = fi/(l+Bbix/i?i). Однако за пределами fx{-\--{-RnbixIRi) сюда добавляется еше влияние прямого прохождения сигнала. Верхний предел можно отодвинуть в сторону более высоких •частот за счет оптимизации параметров операционного усилителя, которая может проводиться по двум направлениям: 1) путем увеличения частоты единичного усиления ft и 2) уменьшением выходного сопротивления /?вых (см. штриховые кривые на трафике). Нижний предел (если он существенно проявляет се-,бя, например в быстром интеграторе) можно сдвинуть в сторону более низких частот, увеличивая коэффициент усиления без •обратной связи по постоянному току Ло. 8.3.3. Погрешность за счет синфазной входной емкости Повторитель напряжения, показанный на рис. 8.9, еще раз воспроизведен на рис. 8Л8. Структура выражения для нормализованного коэффициента усиления этой схемы +/?"с„нф][1Д1+/Ш1. (8.27) fr = h2nC\,iR,\\R\,) тга же, что и уравнения (8.6). Связанные с Z+сииф погрешности равны v=\RrlR\un+WU ] 1 \ (8-28) ШрИ Рг<Р+синф И f</r. Статическая погрешность РгЩсшф была определена в разд. .2.3. Следует отметить, что преимущества операционных усилителей с ПТ-входом перед биполярными проявляются только на 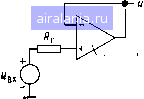 "СИНф ) СИНф 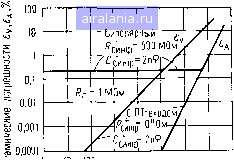 s 1м ium iuUm 1 10 100 1к Юк ЮОк Частота/, Гц Рис. 8.18. Динамические погрешности повторителя напряжения за счет полного синфазного входного сопротивления 2+сикф [см. также уравнение (8.28)]. Высокий уровень полного входного сопротивления ОУ с ПТ-входом сохраняется только на очень низких частотах. Инвертор напряжения (рис. 8.19,а). Емкость Сг считается нежелательной, но до сих пор мы не рассмотрели, откуда она появляется. Наличие ее в схеме изменяет выражение для коэффициента усиления с обратной связьй, так что теперь он уже не равен Сид = -Rj/Ri, а определяется по формуле G - GaJ{l-\-+Ulh), /2= l/2nC.>/?2, и результирующая векторная погрешность 8y = f/f2 (8.29) при /<С/2- Естественно, имеется также и динамическая погрешность \l\A\=flU. Если f2>fc, то погрешность, определяемая уравнением (8.29), пренебрежимо мала по сравнению с динамической погрешностью, которую дает сопрягающая частота fc- В гл. 9 и 12 мы увидим, что по многим причинам часто наблюдается как раз обратная картина, и преобладающей является погрешность f/f2. Встает вопрос, как исключить такие ситуации. Для этого можно воспользоваться двумя возможностями: 1) уменьшить величины сопротивлений обратной связи и 2) компенсировать возникающие погрешности. Малая величина сопротивлений обратной связи от 5 кОм до 500 Ом является характерной особенностью бт.1стродействую-щих инверторов напряжения. Однако если низкий уровень полного входного сопротивления нежелателен, то следует искать компромиссное решение. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 [88] 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 0.007 |