
|
|
|
Главная -> Симисторы 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [16] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 вания на угол ф, где определяется соотношением XjR, то возникает нерабочая зона регулирования и для обеспечения нормальной работы схемы вводится ограничение начального положения угла регулирования а > Действительно, в период а < симистор продолжает пропускать ток в направлении, определенном ЭДС самоиндукции нагрузки, а не напряжением сети, и он не включится в обратном направлении до тех пор, пока эта ЭДС не станет равной нулю, что и создаст нерабочую зону. В связи с этим в системах с индуктивным характером нагрузок чаще всего применяют широкие управляюидие импульсы или пачки узких пульсов. В этом случае, даже если а <ip, симисюр откроется в нужном направлении при угле в момент перехода тока через нуль. Ток, проходящий по цепи, определяется в соответствии с законом Ома ;редним (или действующим) напряжением и полным сопротивлением нагрузки. Так. при регулировании напряжения и тока по рис. 48 действующее значение тока, проходящего через нагрузку, / = £ (Л?, + 4), ,. (28) или с учетом (27) " Um I liTi - а) + sin2a / = /-1--, . . (29) Из последнего выражения следует, что действующее значение тока при фазовом регулировании при неизменном питающем напряжении (ищ - const) и нагрузке (/?„, Хн) зависит только от угла регулирования а. Симистор, так же как и тиристор, позволяет изменять среднее значение выпрямленного напряжения на нагрузке, но в отличне от последнего он может изменять и его полярность, Так, при включении симистора V в цепь нагрузочного резистора /?ц (рис. 49, о) можно подавать управляющие импульсы на симистор с углом управления а при направлении напряжения питающей сети U, показанном на рисунке сплоншой линией. В этом случае симистор работает так же, как и тиристор в однофазной однополупернодной схеме выпрямления, и в положительные полупериоды питающего напряжения (рис. 49, б) иа нагрузке напряжения представляет собой положительные части синусоиды, усеченные на угол регулирования а (рис. 49,-3). Среднее значение выпрямленного напряжения = j sinojidt ;; (зо) 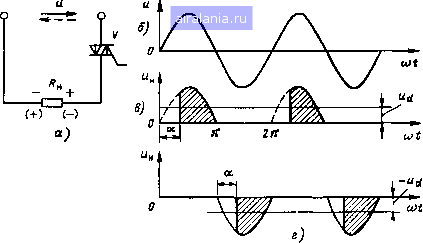 Рис. 49. Схемы однополупериодного выпрямления и реверщрования напряжения на нагрузке (а), кривые переменного (б) и выпрямленного напряжения разной полярности (в и г) прикладывается к нагрузке с полярностью, указанной на рис 49, а. Если открытие симистора производить с тем же углом а, но в отрицательный полупериод питающего напряжения (на рис 49, а направление напряжения условно показано пунктирной стрелкой), то симистор будет проводить ток в другом направлении и напряжение на нагрузке будет соответствовать рис. 49, г. Среднее значение выпрямленного напряжения в этом случае имеет противоположный знак и приложено к нагрузочному резистору с полярностью, показанной иа рис 49, а в скобках. Следует заметить, что термины "положительный" и "отрицательнь[й" полунериоды являются условными и введены здесь и далее для пояснения работы схемы Так, с помощью симистора можно изменять как величину, так и полярность выпрямленного напряжения, что используется для управления электродвигателями постоянного тока, предназначенными для привода реверсивных механизмов. 9. РЕГУЛИРОВАНИЕ ЧАСТОТЫ И НАПРАВЛЕНИЯ ВРАЩЕНИЯ i ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ В различных бытовых механизмах требуется регулировать скорость и направление вращения исполнительных устройств Для этого используются электродвигатели постоянного тока, переменного тока коллек- торные или с коротко замкнутым ротором. Каждый из этих электродвигателей имеет свои особенности и законы регулирования, а применение симисторов открывает новые возможности их использования. Регулирование частоты и направления вращения электродвигателей часто используется для регулирования подачи вентиляторов, насосов и других бытовых механизмов. Регулирование частоты вращенин двигателей постонниого тока Частота вращения электродвигателя постоянного тока, oG/iwffii, п = (U - т)1СФ, (31) где Ф - магнитный поток, Вб; С - постоянный для данного двигателя коэффициент. Из приведенного выражения видно, что скорость можно регулировать, изменяя напряжение U, сопротивление цепи R или магнитный поток Ф. Изменяя полярность напряжения или магнитного потока, можно менять направление вращения электродвигателя. На рис 50 приведена упрощенная линеаризированная зависимость частоты вращения электродвигателя постоянного тока с независимым возбуждением (Сф = const) при пуске с постоянной нагрузкой на валу (/= const) , построенная в соответствии с выражением (31), Как следует из приведенной графической зависимости, при регулировании напряжения от нуля до некоторого значения, определяемого произведением IR, двигатель не вращается, поскольку вращающий момент на его валу еще недостаточен для трогания приводного механизма. В реальных системах управления электродвигателем однополупериодные схемы вьшрямления практически не используются, поскольку имеют большие пульсации напряжения и тока. Для примера рассмотрим приведенную на рис. 51 схему трехфазного мостового реверсивного преобразователя на симисторах, питающего якорь электродвигателя постоянного тока. В зависимости от величины и полярности сигнала Рис. 50. Зависимость частоты вращения электродвигателя постоянного тока от приложенного к нему напряжения 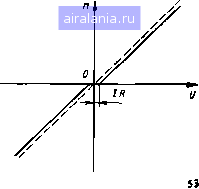 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [16] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 0.0021 |