
|
|
|
Главная -> Симисторы 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [18] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 Рассмотренный выше способ реверсирования в полной мере относится и к мостовой схеме выпрямления. Отличие состоит лишь в том, что первая коммутация в инверторном режиме наступает на тг/б с раньше, чем в нулевой схеме. Для осуществления устойчивой работы в режиме инвертирования должно соблюдаться соотношение 3 > 7 + 6 + ji. Угол 3 в основном определяется углом коммутации 7, а последний зависит от индуктивности обмоток трансформатора и нагрузки. Регулирование частоты вращенин двигателей переменного тока В бытовых приборах - вентиляторах, калориферах и др. ~ широкое применение получили электродвигатели переменного тока, в основном асинхронные [3, 5, 8], применяются также коллекторные электродвигатели. Эти двигатели имеют ряд преимуществ перед двигателями постоянного тока: простота в обслуживании, относительно невысокая стоимость и др. Асинхронные электродвигатели (АД) с короткозамкнутым ротором, которые получили наиболее широкое применение вследствие своей простоты и надежности, имеют трехфазную обмотку на статоре, а обмотка ротора выполнена в виде металлических стержней, соединенных кольцами и получивших название "беличьей клетки" ввиду внешнего сходства конструкции. Частота вращения АД определяется по выражению jv.4f?i( , «у и" п= -(1-5), (33) где / - частота питающей сети; Р - число пар полюсов; 5* - скольжение Из приведенного выражения следует, что регулировать число оборотов АД можно, изменяя частоту питающей сети, скольжение и число полюсов. Направление вращения АД определяется направлением вращения его магнитного поля, т.е. чередованием фаз питающей сети. Изменяя подключение обмотки статора электродвигателя к питающей сети, можно изменять и направление вращения ротора электродвигателя. Если же АД отключить от сети и к любым двум выводам обмотки статора подключить источник Постоянного тока, то под действием постоянного магнитного потока в обмотке ротора будет возникать ЭДС,  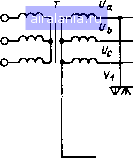 X I i П
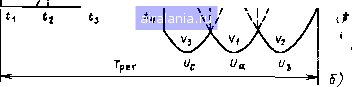 Рис. 53. Схема преобразователя частоты с непосредственной связью (а), диаграмма напряжений (б) которая, взаимодействуя с вызвавшим ее магнитнь[м потоком, будет создавать тормозной момент, т.е. приводить в соответствие частоты вращения ротора и магнитного потока {щ = 0). Такой режим носит название динамического торможения. Рассмотрим более подробно способы регулирования частоты вращения АД, которые следуют из выражения (32). Для регулирования частоты питающего напряжения нередко используются преобразователи с непосредственной связью ~ циклокон-верторы (рис. 53, а). Каждая из фаз статора АД Z, Z, Zc, соединена в звезду и питается от симисторного реверсивного преобразователя (/ - /), собранного по нулевой схеме выпрямления. Рассмотрим работу этого преобразователя на примере фазы, управляемой группой симисторов Ki + Кз. Предположим, что фазные напряжения на вторичных обмотках трансформатора Т изменяются по синусоидальному закону, а нагрузка имеет активный характер. Если симисторы заперты, т.е. управляюпдие импульсы на них не подаются, то все напряжение прикладь[вается к закрытым симисторам и напряжение иа нагрузке равно нулю. ГТодаднм в момент ti управляющий импульс на симистор , затем в момент Гз на симистор К2 и в момент Г3 на симистор Кз Симисторы поочередно откроются, и к нагрузке будет приложено напряжение, представляющее собой участки трех синусоид вторичных напряжений Ь, с, как это показано на рис. 53, 6. Если теперь снять управляющие импульсы и после снижения тока до нуля вновь их подать в точках естественной коммутации (fj, fg, 7), симисторы начнут проводить ток в другом направлении. Напряжение иа нагрузке представляет собой участки синусоид, но другой полярности. Происходит процесс переключения симисторов, аналогичный реверсированию нагрузки в системах постоянного тока. Если теперь осуществлять периодическое поочередное включение симисторов то в одном, то в другом направлениях, то изображенная на рис 53, б кривая будет периодически повторяться с периодом Грр и частотой/рр = = 1/Грег. Период Грер этого напряжения больше, чем период сетевого напряжения Т, а частота/ре,г соответственно меньше. Соотношение между этими параметрами определяется выражением 3 -ь 2й Трег = Тс - . (34) где А = О, 1, 2 . . - число открываемьвмисторов в группе за вычетом одного; отсюда 1 3 I • Л rt /per = - = /с --- - (35) Из последнего выражения видно, что регулируемая частота /pgp может изменяться лишь дискретно, в зависимости от числа открываемых симисторов. Ниже приведен ряд значений частоты /рег в зависимости от h при трехфазной питающей сети с частотой 50 Гц h . ....2 3 4 5 6 7 /per-Гц.....21,4 16,7 13,6 11,5 10 8,8 С помощью рассматриваемого принципа регулирования частоты можно обеспечить и плавное регулирование частоты за счет регулирования паузы At„, когда управляющие импульсы не подаются и преобразователь закрыт (см. рис 55, 5). В этом случае вь[ходная частота /рег = /с----- (36) 3 -ь 2ft + ДГп/с . . . V .... 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [18] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 0.0021 | |||||||||||||||||||