
|
|
|
Главная -> Симисторы 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 [19] 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 Плавно регулируя паузу ДГд, можно плавно изменять выходную частоту/ре г- Сдвиг фаз напряжений и токов в обмотках статора АД достигается за счет сдвига на Зтг/З управляющих импульсов, подающихся на одноименные симисторы в группах /- /, Реверсирование АД в такой схеме производится за счет изменения последовательности подачи управляюпдих сигналов на соответствующие симисторы групп /-Я/, например сначала на симистор Vi группы и только затем со сдвигом по времени на симистор Ki группы / Другим возможным способом регулирования частоты вращения АД, нашедшим широкое применение, является изменение напряжения на его статоре при постоянной частоте, равной частоте сети, те. изменения скольжения S. В зтом случае между выводами питающей сети и АД устанавливаются симисторнын регулятор напряжения (СРН) (рис. 54, д). Механические характеристики обычного АД (зависимость частоты вращения от момента иа его валу) приведены на рис. 54, 6 при различных снижениях напряжения относительно номинального значения U-i > 1/2 > f/3. Из этих зависимосгей следует, что при постоянном моменте нагрузки на валу Мс частота вращения п изменяется в небольших пределах между точками 1 и 3. Однько если ввести в цепь ротора добавочные сопротивления, что часто достигается путем выполнения корот-козамьнсающих колец беличьей клетки ротора из материала с повышенным удельным сопротивлением, то механические характеристики становятся мягкими и пределы регулирования значительно расширяются (точки J -3 на рис. 54, в) . Для получения благоприятных для регулирования механических характеристик АД необходимо регулировать угол открытия симисторов о в зависимости ог изменения момента на валу Мс. Эту функцию Л О во СО "1 ш дагjn
рис. 54. Схема нереверсивного симисторного регулятора (а), механические характеристики короткозамкиутого асинхронного двигателя с обьпшым (б) и повышенным сопротивлением в роторной цепи (б) АО SO СО ш ш ш рис 55. Схема асинхронного электропривода с симисторным регулятором напряжения (а), механические характеристики электропривода в замкнутой системе регулирования (б) обычно выполняет система автоматического регулирования за счет введения в день устройства управления симисторами дополнительных электрических сигналов, которые реагируют на колебания момента нагрузки или частоты вращения АД и соответствующим образом изменяют угол регулирования а. В качестве примера на рис. 55, а приведена электрическая схема электропривода с обратной связью по скорости, которая может применяться в тех системах, где необходимо точное поддержание скорости. К валу АД подсоединен вал тахогенератора ТГ, ЭДС которого пропорциональна частоте вращения ет-г = 7«, где у ~ коэффициент пропорциональности. ЭДС тахогенератора сравнивается с задающим напряжением щ, снимаемым с потенциометра R, и подается на управляющий вход системы импульсно-фазового управления СИФУ. Управляющее напряжение (/у, определяющее сдвиг отпирающих симисторы импульсов, равно: Щ = и. (37) В такой замкнутой системе при изменении нагрузки на валу АД, например при увеличении нагрузки, при данном напряжении снижается частота вращения «, а соответственно будет снижаться и ег- Уменьшение вызовет согласно (37) увеличение напряжения управления Uy, что в свою очередь вызовет уменьшение угла а открытия симисторов и увеличение напряжения на АД. Увеличение напряжения вызовет соответствующее увеличение частоты вращения, которое установится на уровне, близком к первоначальной скорости. В результате удается получить довольно жесткие механические характеристики, т.е. Практически постоянную частоту вращения АД неза- 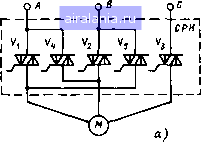 a С J рис. 56. Схема реверсивного симисторного регулятора напряжения (а), включение симисторов в режиме динамического торможения (б) висимо от приложенной нагрузки при заданном значении напряжения задания U3. На рис. 55,5 приведена механическая характеристика электропривода при различных значениях напряжения задания, определяемого положением движка потенциометра R (рис. 55, а). Из рисунка следует, что эти характеристики имеют относительно высокую жесткость н позволяют обеспечить большой диапазон изменения частоты вращения при постоянном моменте на валу АД, Если схема, приведенная на рис. 55, а и состоящая из трех симисторов, позволяет осуществить регулирование частоты вращения, то схема из пяти симисторов (рис. 56, а) позволяет кроме регулирования еще и реверсирование, т.е. изменение направления вращения АД. Так, при подаче сигналов управления на симисторы Vi - напряжение на выводах АД будет иметь последовательность фаз ABC и ои будет вращаться, например, по часовой стрелке. При подаче сигналов управления на симисторы F4, ts и (сигналы управления с симисторов Kj, сняты) на выводах АД будет другая последовательность фаз -ВАС, при этом направление вращения магнигного поля статора и соответственно вращения ротора АД изменится на обратное. Используя симисторы реверсивного регулятора напряжения, можно обеспечить подачу в цепь статора постоянного тока и осуществить тем самым режим данамического торможения АД. Для этой цели оДЕ1а фаза обмотки статора вращающегося АД отключается от сети с помощью коммутацнонного аппарата или снятием сигналов управления с симистора этой фазы (например, с симистора Гз), а оставшиеся в работе симисторы управляются своими сигналами управления так, что создают однофазную мостовую выпрямительную схему, питающуюся от фаз АВ сети, как это показано на рис. 56, б (для наглядности симисторы на этом рисунке зачернены в проводящем направлении). В этом случае 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 [19] 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 0.0098 | |||||||||||||||||||||||||