
|
|
|
Главная -> Магнитоэлектроника 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 [20] 21 22 23 24 25 26 27 28 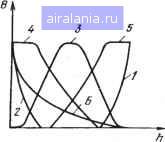 Рис. 5.1. Зависимость индукций магнитного поля от .хода головки клавиши для клавиатур с различными магнитными системами ку. Основные характеристики бесконтактных клавиш на основе анализа, обобщения и систематизации отечественных и зарубежных разработок приводятся в (58]. На рнс. 5.1 показана зависимость изменения индукции магнитного поля, действующего па магниточувст-вительный элемент - магнитодиод, от хода головки клавиши для клавиатур с различными магнитными системами. В клавишах с магнитной системой, соответствующей кривой 1, индукция достигает своего максимального значения к концу хода в предельно нажатом состоянии головки. В клавишах с магнитной системой, соответствующей кривой 2, индукция достигает своего максимального значения в исходном положении и резко уменьшается с началом перемсщення магнитной системы. В клавишах с магнитной системой, соответствующей кривой 3, индукция достигает своего максимального значения между исходным п предельным положениями головки п т. д. Конструкция клавиши, соответствующей кривой 6, приведена на рнс. 5.2. Один из барисво-ферритовых магнитов / прикреплен к корпусу, другой 2 перемещается с нажатием головки 3 клавиши. Магнитодиод 4 установлен между ними неподвижно. Характер изменения усилия нажатия на головку клавиши происходит по кривой 6 па рис. 5.1. Такой характер изменения способствует плавному приближению подвижной части к предельному положению. Он достигается воздействием иа подвижную часть силы отталкивания подвижного магнита и одноименного полюса непо-. движного магнита. Возвращение головки клавиши в исходное положение происходит за счет сял отталкивания магнитов. Изменение тока через магнугтодиод происходит при перемещении го- 4 3 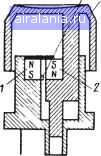 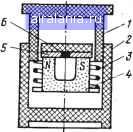 Рис. 5.2. Бесконтактная клавиша соответствующая кривой 6 рнс. 5.1 Рис. 5 3. Бесконтактная клавиша соответствующая кривой 2 рис. 5.1 ловки клавиши из начального (ненажатого) положения в конечное (нажатое). Эта клавиша отличается простотой конструкции, технологичностью в изготовлении, содержит дешевые недифицитные материалы и комплектующие изделия. Клавиша другого типа соответствует кривой 2 ка рис. 5.1 и состоит из головки / (рис. 5.3), постоянного магнита П-образной формы 4, пружины <?, которая является связующим звеном между головкой и магнитом, магнитомягкой пластины 5, закрепленной в корпусе 2, и магнитодиода 6. При нажатии на клавишную головку пружина сжимается, что приводит к отрыву магнита от магнитомягкой пластины. При максимальном сжатии пружины магнит свободно опускается до дна корпуса, вызывая резкое уменьшение индукции магнитного потока через магнитодиод, в результате чего уменьшается его сопротивление и клавиша выдает сигнал. После снятия пальца с клавишной головки она под действием сжатой пружины и силы магнитного притяжения возвращается в исходное положение. Поток силовых линий магнита замыкается через магнитодиод, его сопротивление резко растет, и электрическая цепь размыкается. В заключение отметим, что клавиши на магнитоднодах в зависимости от способа перемещения подвижной части делятся на две группы: клавиши с пружинами и клавиши на эффекте магнитного притяжения. Последние отличаются большой надежностью, эффективностью и простотой конструкции. При выборе любой из них должны быть обеспечены следующие условия. 1- Для получения эффективного выходного сигнала при срабатывании электронной схемы необходимо обеспечить максимально возможное изменение индукции магнитного поля, что обеспечивается соответствующим выбором постоянного магнита и воздушного зазора, в котором расположен магнитодиод. 2. Магнитную систему клавиши необходимо построить так, чтобы силы магнитного притяжения, препятствующие перемещению его подвижной части, были минимальными. 3. Кинематическая схема клавиши должна быть такой, чтобы при нажатий на его головку магнитодиод оставался неподвижным. Это позволяет предохранять выводы магнитодиода от обрывов, тем самым обеспечивая высокую надежность работы клавиши. 4. Клавиши любой из групп имеют достоинства и недостатки. Поэтому рекомендовать однозначный выбор практически невозможно. Для ввода информации бесконтактные клавиши имеют бесспорное преимущество перед механическими. Однако в сильноточной технике клавиши с механическими контактами имеют определенное преимущество по сравнению с бесконтактными. 5.3. ДАТЧИКИ ПОЛОЖЕНИЯ ДВИЖУЩИХСЯ ПРЕДМЕТОВ Для создания автоматизированных систем управления в различных областях народного хозяйства начинают широко применяться различные датчики, в том числе датчики положения движущихся предметов (ДПП). В настоящее время они используются в металлорежущих станках с программным управлением, подъемных кранах, конвейерах и в различных транспортных системах. Принципы работы ДПП основываются на различных физических явлениях: фотоэффекте, изменениях емкости и электромагнитной индукции, гальваномагнитного эффекта и др. Датчики движущихся предметов, работающие на основе фотоэффекта (фотореле), потребляют большую мощность, чувствительны к пыли и грязи, что затрудняет их эксплуатацию. ДПП, использующие емкостные явления, имеют большие габаритные размеры и довольно сложные конструкцию и электрическую схему [59]. Относительно большое применение получили ДПП, работающие на основе электромагнитной индукции [60]. Они могут обнаружить металлические предметы на расстоянии до 10 мм. Основной недостаток таких ДПП - большие размеры чувствительных элементов (катушек). Датчики движущихся предметов, использующие гальваиомагнитные явления, отличаются высокой чувствительностью, надежностью, малыми габаритными размерами и малой потребляемой мощностью, простотой конструкции. Они делятся на две группы. К первой относятся ДПП, срабатывающие при перемещении предметов из магнитомягкого материала, ко второй - ДПП, срабатывающие при перемещении предметов (из немагнитомягкого материала) с укрепленными на них постоянными магнитами. Датчики движущихся предметов на основе эффекта Холла, в отличие от ДПП на магниторезисторах, чувствительны к направлению перемещения предметов. ДПП на датчиках Холла и магниторезисторах, обладая определенными преимуществами, имеют существенный недостаток: малые значения выходного сигнала, что затрудняет построение электрических схем, формирующих электрические сигналы. В последние годы для повышения надежности и точности, стойкости к воздействиям окружающей среды (в том числе к вибрациям и ударам), долговечности в ДПП начали использовать магнитодиоды. При прочих равных условиях ДПП на магнитодиодах позволяют получать выходной сигнал, превышающий сигналы на датчиках Холла и магниторезисторах более чем на порядок. У нас в стране интересные работы по созданию ДПП на магнитодиодах проведены в институте Систем управления АН ГрузССР [57]. Принципиальная электрическая схема ДПП на магннтодиоде приведена на рис. 5.4. Магнитное поле изменяет сопротивление магнитодиода и, следовательно, входной ток транзистора, что приводит к изменению 66 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 [20] 21 22 23 24 25 26 27 28 0.0098 |