
|
|
|
Главная -> Магнитоэлектроника 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 [24] 25 26 27 28 нации 6, однако на выходах 6 будут нулевые сигналы прн изменении входного угла от О до 180". При а=180° произойдет первое переключение, т. е. поворот КЭ разряда десятков грубого отсчета и, следовательно, один пз магнитодиодов 6 окажется в зазоре что будет соответствовать коду «1» в разряде десятков ЦПУ-М. Поскольку отношение дискретного переключающего механизма равно 2/20, то переключение будет происходить через каждые 180° и, следовательно, в момент а = = 10-180° произойдет первое переключение в разряде сотен ЦПУ-М и т. д. Кодирующий элемент имеет простую конструкцию (рис. 5.13,(5) и содержит минимальное число границ перехода «1-О», т. е. всего две границы формирования магнитного поля заданной геометрии на краях КЭ, где индукция изменяется от О до 0,3 Тл. Это упрощает изготовление ЦПУ-М, снижает требования к точности юстировки СЭ и уменьшает погрешность преобразования. Кодирующий элемент имеет следующие параметры: 0 = 22 мм; fi = 2 мм; йз = 0,3±0,03 Тл: т=13,5 г; 5„ = 0,2 Тл/мм, где 5„- крутизна поля на границе перехода «О-1». Описываемый ЦПУ-М имеет следующее достоинство: параметры КЭ и конструкция преобразователя унифицированы и допускают смену выходного кода двоично рефлексного либо двоично-десятичного рефлексного по ГОСТ 12814-74. Электронные узлы считывания и преобразования информации ЦПУ-М выполнены в виде унифицированных модулей [72], содержащих в зависимости от регулируемого кода по 8 или 10 магнитодиодов, а вся электронная схема состоит пз двух гибридных интегральных схем (ГНС), размещенных в двух стандартных корпусах. Основные параметры ЦПУ-М [71] (в скобках приведены значения кода Грея) Диапазон изменения вхолного параметра А .... . (О-100)-360° (0-64)-360° Число дискретных отсчетов N........ 2000(1024) Угловая величина кванта a.v...... .18+9" (22.5±1Г) Момент на входном валу Л1.........;30 г/см Выходной код.............Двоично-десятпч- иый рефлексный или код Грея но ГОСТ 12814-74 Число двоичных разрядов ........ .13(10) Напряжение питания Un .......12 В± 10"/о Ток нагрузки двоичного разряда.......«{О мА Диапазон рабочих температур Т....... 30-H-f-55° 5.9. БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА Бесколлекторные двигатели постоянного тока имеют мощность от долей ватта до сотен киловатт и успешно применяются на транспорте, электростанциях, летательных аппаратах, в вы-76 числительных машинах, системах звуко- и видеозаписи, в медицине и других устройствах высокой надежности с длительным сроком службы и хранения. В нашей стране и за рубежом ведутся многочисленные работы по исследованию п разработке новых типов бесколлекторных двигателей постоянного тока на основе гальваномагнитных приборов, которые сочетают в себе преимущества двигателей постоянного тока и бесколлекторных двигателей переменного тока. Применение гальваномагнитных приборов в качестве датчиков положения ротора дает возможность разработать бесколлекторные двигатели с более высокой надежностью, лучшими электри-ческимп характеристиками, а также с меньшими габаритными размерами и массой, чем коллекторные двигатели постоянного тока. Бесколлекторные двигатели на основе гальваномагнитных приборов имеют ряд преимуществ: отсутствие щеток и коллектора, что позволяет обеспечить простой запуск двигателя, плавность его хода и бесшумность; увеличенный срок эксплуатации; отсутствие искрообразования (благодаря чему онн могут найти широкое применение в газовой, нефтяной, химической промышленности, в шахтах и в других взрыво- или пожароопасных средах); отсутствие электрических помех и, следовательно, помехозащитных устройств. Схема устройства бесконтактных двигателей постоянного тока включает собственно исполнительную часть двигателя - электрическую машину, коммутаторы обмоток двигателя, (заменяющих коллекторный узел), датчик положения ротора, тахогенератор и электронную схему стабилизации оборотов двигателя. В этих двигателях ротором служит цилиндрический постоянный магнит. В воздушном зазоре двигателя установлены якорные обмотки с одной общей точкой электрического соединения. Остальные концы обмоток соединены с транзисторами, управляемыми гальваномаг-ннтнымп датчиками. Подобная схема создает вращающее магнитное поле, которое приводит во вращение ротор. В двигателе может быть четыре обмотки статора (смещенных относительно друг друга на 90°) или три (смещенных на 120°). 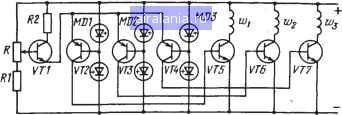 Рис. 5.14. Принципиальная электрическая схема бесколлекторного двигателя с магнитодиодами 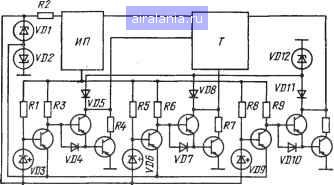 Рис. 5.15. Принципиальная электрическая схема бесколлекторного двигателя с двумя источниками питания В [1, 73] в качестве датчиков положения ротора используются датчики Холла и магниторезисторы. Применение магнитодиодов позволило разработать несколько схем коммутирующих устройств для бесколлекторных двигателей. В [74] приводятся результаты разработки бесколлекторного двигателя, где коммутация тока в обмотках статора осуществляется магнитодиодами. В этом случае на статоре укрепляются три магнитодиодные пары (характеристи- ки пар должны быть одинаковыми) с угловым расстоянием 120°. •Электрическая схема включения приведена на рис. 5.14. Если с помощью потенциометра R управлять потенциалом эмиттера транзистора \Т1 так, чтобы транзисторы \Т2-\Т4 открылись, то транзисторами \Т5-V77 в каждой из обмоток статора можно обеспечить ток в течение времени, за которое статор повернется на угол 120°. Принципиальная электрическая схема бесколлекторного двигателя с двумя источниками питания приведена на рис. 5.15 [75]. В бесколлекторных двигателях с трехсекцион-ной обмоткой коммутация то-ка в секциях обмотки возбуждения осуществляется по сигналам, поступающим от магнитодиодов, установленных в статоре под углом 120°. Конструкция аксиально намагниченного дополнительного ротора обеспечивает в зоне магнитодио-Рнс. 5.16. Схема бес коллекторного дви- Отсутствие коммутирующе- гателя постоянного тока: ТО магнитного потока при угле /-магнитодиоды; 2 - коммутаторы ПОВОрОта ОКОЛО 130° И НаЛИЧИе 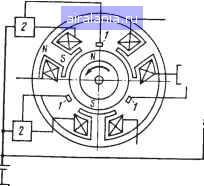 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 [24] 25 26 27 28 0.0051 |