
|
|
|
Главная -> Математическое описание сэп [0] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 Математическое описание СЭП должно учитывать реально существующую взаимосвязь между электромагнитными, механическими и технологическими процессами. Это приводит к существенному усложнению динамических структур СЭП, что, в свою очередь, осложняет синтез оптимальных настроек регуляторов и дополнительных корректирующих связей. К тому же в большинстве случаев структуры СЭП оказываются нелинейными, что требует применения нелинейных методов исследования динамики или соответствующих приемов линеаризации систем. Проблема построения и оптимизации СЭП в условиях влияния упругих связей и вариации параметров привлекает к себе широкое внимание специалистов. Основным направлением проводимых исследований следует считать создание комплексной методики проектирования СЭП как единой электромеханической системы с учетом существенных параметров и связей и реальных условий промышленной эксплуатации. Указанные вопросы успешно решаются отечественными учеными. В трудах Ю. А. Борцова, Б. Ш. Бургина, Н. Н. Дружинина, В. И. Ключева, А. А. Сиротина, А. С. Филатова и других разработаны фундаментальные вопросы теории электромеханических систем с упругими связями, определены основные пути их анализа и синтеза. В зарубежной литературе можно отметить работы Д. Аренса, Г. Бранденбурга, Е. Рааца, В. Шпета [64, 65, 67, 68], посвященные исследованию унифицированных СЭП с упругими звеньями. Вместе с тем ряд вопросов требует дальнейшей разработки, а некоторые проблемы еще не нашли в литературе должного освещения. К ним следует отнести вопросы эквивалентирования многомассовых механических систем и разработки адекватных моделей, удобных для анализа и синтеза различными структурными методами исследования динамики. Немаловажное значение имеет создание инженерной методики оптимизации взаимосвязанных СЭП применительно к агрегатам различного класса, а также методики исследования унифицированных систем с нелинейными упругими .звеньями. Следует указать и на весьма важную проблему поиска оптимальных структур СЭП, обеспечивающих высокое качество динамики В условиях взаимосвязи электрических, механических и технологических факторов, естественной вариации параметров и действия различных внешних возмущений. В соответствии с изложенным первая глава книги посвящена математическому описанию и методам исследования СЭП. В ней обсуждены пути получения адекватных моделей электромеханических объектов управления, изложены возможности ряда структурно-топологических методов исследования динамики (методы структурных преобразований, частотные, машинные) и рассмотрена методика идентификации параметров систем с упругими связями. При этом классификация упругостей сделана в соответствии с работой [131, т. е. к упругим связям первого рода отнесены упругие механические передачи между двигателями и рабочими органами агре- Гйтов, а к упругим связям второго рода - обрабатываемые ленточные материалы (бумажное полотно и т. п.) и замкнутые леиты (технические сукна, металлические и синтетические сетки), приме-пиемые на многоприводных секциях агрегатов целлюлозно-бумажной промышленности. Во второй главе изложена инженерная методика оптимизации систем подчиненного регулирования электроприводов с упругими спизями первого и второго рода. При этом рассмотрены новые способы оптимизации контуров АСР, обеспечивающие лучшее качество динамики систем по сравнению с традиционными настройками на оптимум по модулю и симметричный оптимум. Для подавления упругих колебаний предложены простые, но достаточно эффективные средства последовательной и параллельной коррекции, обеспечи-йиющие простоту наладки и надежность эксплуатации. Основное внимание уделено анализу динамики многодвигательных СЭП с од-нопременным влиянием упругих связей первого и второго рода; ирн этом оттенены особенности влияния как разомкнутых, так и ишкнутых упругих связей второго рода. Изложение ведется при-м(Ч1ительно к непрерывно-поточным агрегатам, работающим в режиме поддержания постоянства скорости, и к агрегатам циклического действия, работающим преимущественно в режиме частых пусков и торможений, что налагает свой отпечаток на принципы построения и оптимизации СЭП. Синтез многодвигательных СЭП И1.П10ЛПСН с позиций одновременного учета существенных взаимо-(•и11(ч" между локальными АСР, что дало возможность разработать срлпнмтсльио простую методику структурной и параметрической (нггнмизации многосвязных систем. Третья глава посвящена малоизученному вопросу возникнове-ннн н характера автоколебаний в СЭП с упругими связями первого 11 нгорого рода. При этом рассмотрены автоколебательные режимы, обусловленные ограничением выходных напряжений регуляторов н 11лн>п1ием зазоров механических передач. Исследование этих ре-(кнмоп позволило определить рациональные области применения раишчных видов коррекции СЭП с упругими связями и сформули-рпиать требования к параметрам механических передач. И четвертой главе рассмотрены вопросы оптимизации СЭП по И1»1мупц1ющим воздействиям. Современные СЭП строятся по принципу подчиненного регулирования. При этом зачастую не удается р(/1лп:ювать оптимальные динамические характеристики СЭП из-за илииния ра.зличных факторов: ограниченного быстродействия, уп-pviiHTii механических передач и т. д. Поэтому требуемые динами-mickiif ,\а[)актеристики СЭП могут быть достигнуты не за счет по-itMiHiiniii частоты среза системы, а путем компенсации возмущений и 1чог11(гствии с принципами теории инвариантности. Для полу-Ч1Ч11111 пп(1юрмации о доминирующих внешних возмущениях разра-бпглш.! структуры устройств косвенного измерения возмущений п .статических наблюдающих устройств. Рассмотрены возможно-»-гп реализации условий абсолютной инвариантности в различных типах СЗП. Исследования показали, что абсолютную инвариантность к действующим возмущениям в рассматриваемых СЭП нельзя обеспечить, однако выполнение условий частичной инвариантности существенно улучшает динамику систем. Синтезированные СЭП, строго говоря, относятся к классу квазиинвариантных систем, однако авторы сочли возможным называть их инвариантными системами, учитывая их высокую эффективность. Излагается оригинальный подход к синтезу полиинвариантных СЭП. Пятая глава посвящена различным аспектам применения теории чувствительности при проектировании высококачественных СЭП. Для оценки чувствительности разработаны алгоритмы расчета на ЦВМ функций относительной чувствительности передаточных функций СЭП, которые позволяют преодолеть вычислительные трудности других известных методов оценки чувствительности. Анализ чувствительности СЭП позволяет выделить совокупность критериальных параметров, в значительной степени определяющих качество системы. Для сравнения различных СЭП по чувствительности и для оптимизации систем с учетом чувствительности введена усредненная норма чувствительности, показано использование аппарата теории чувствительности для решения некоторых практических задач. На основе обобщения результатов анализа чувствительности и синтеза инвариантных СЭП сформулированы условия достижения ограниченной чувствительности и двукратной инвариантности, применение которых позволило синтезировать малочувствительную многосвязную систему регулирования натяжения материала на непрерывно-поточном агрегате. Изложение в книге ведетсявТзначительной степени применительно к унифицированным СЭП агрегатов цатлюлозно-бумажной промышленности. Вместе с тем математическое описание, методика исследований и приведенные рекомендации по построению и оптимизации СЭП могут быть с успехом применены и для тиристорных электроприводов агрегатов смежных отраслей промышленности (металлургическая, текстильная, химическая и др.). Главы 1 (кроме § 1.4), 2 и 3 написаны В. М. Шестаковым, главы 4, 5 и § 1.4 -В. Н. Егоровым. Авторы благодарны канд. техн. наук, доценту Н. И. Чичерину за просмотр рукописи, инженерам Л. В. Далидович, Я. Ш. Ильясову, Л. И. Красько и Б. В. Теп-лякову за помощь в проведении" исследований на аналоговых и цифровых вычислительных машинах, а такжевесьма признательны доктору техн. наук, проф. Ю. А. Борцову йстаршему научному сотруднику Н, М. Писковацкому за ряд полезных замечаний, сделанных при рецензировании рукописи. Пожелания и замечания по книге просьба направлять по адресу: 191041, Ленинград, Марсово поле, 1, Ленинградское отделение Энергоатомиздата. Авторы ОСНОВНЫЕ ОБОЗНАЧЕНИЯ лим - ЛСР - MVW - ЛСРС - лчх -им ~ 1»У - Itn: ли ~ т П.:> -Д/1 - .111 - К1 -км -- .11 дч Ш III IK I I lit I iM I II аналоговая вычислительная машина автоматическая система регулирования автоматическая система регулирования натяжения ацтоматическая система регулирования скорости ачтоматическая система управления амплитудно-частотная характеристика бумагоделательная машина педуш,ее устройство гибкая обратная связь датчик натяжения датчик скорости датчик ЭДС датчик тока якоря задатчик интенсивности корректирующ,ее звено карте но делательная машина компенсируюш,ее устройство логарифмическая илитудно-частотная рактеристика логарифмическая ам-ха- II.I стотиая характеристика м1101-ос1)язная система 1.октропривода нелинейное звено норммропанная структурная схема iifiMOTKa возбуждения шпимум по модулю liftpirriiaH связь 11)())циональный ре-I VJurrop )1(11С1рционально-диф-фимциальпый регуля- ПИ - пропорционально-интегральный регулятор ПИД - пропорционально-интегрально-дифференциальный регулятор ПРС - продольно-резательный станок Р - редуктор РВ - регулятор тока (потока) возбуждения РН - регулятор натяжения РО - рабочий орган PC - регулятор скорости РЭ - регулятор ЭДС РЯ - регулятор тока якоря СК - суперкаландр СКО-скорректированный оптимум СО - симметричный оптимум СУ - система управления СЭП - система электропривода ТВ - тиристорный возбудитель ТГ - тормозной генератор ТП - тиристорный преобразователь УКИБ - устройство косвенного измерения возмущения УКИМ - устройство компенсации инерционных масс ФАЧ - функция абсолютной чувствительности ФОЧ - функция относительной чувствительности УБСР -ЛИ - унифицированная блочная система регуляторов на интегральных элементах УНЧ - усредненная норма чувствительности ЦВМ - цифровая вычислительная машина ЦБП - целлюлозно-бумажная промышленность ЭП - электропривод ГЛАВА ПЕРВАЯ МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ И МЕТОДЫ ИССЛЕДОВАНИЯ СИСТЕМ ЭЛЕКТРОПРИВОДА 1.1. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ЭЛЕКТРОПРИВОДА Для систем электропривода (СЭП) с высокими требованиями к статике и динамике наибольшее применение в настоящее время нашел электропривод (ЭП) постоянного тока, развитие которого характеризуется широким внедрением силовых тиристорных преобразователей и унифицированных автоматических систем управления (АСУ). Получившие распространение TnjUo £т.пЛЯ 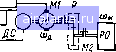 Рис. 1.1. функциональная схема системы подчиненного регулирования скорости электропривода системы подчиненного регулирования характеризуются типовой структурой, стандартными настройками регуляторов и унификацией исполнения на базе-элементов УБСР-АИ [2, 55]. На рис. 1.1 показана функциональная схема системы подчиненного регулирования скорости ЭП с питанием якорной цепи двигателя М от ти-ристорного преобразователя ТП. Система состоит из внешнего контура регулирования скорости шд с датчиком скорости ДС (тахогенератором), регулятором скорости PC и подчиненного контура регулирования тока якоря двигателя с датчиком тока ДЯ и регулятором тока РД, выходное напряжение которого Up. я поступает иа вход системы управления СУ тиристорного преобразователя. Регулятор скорости может быть как пропорциональным (П), так и пропорционально-интегральным (ПИ) регулятором; регулятор тока якоря обычно выполняется как ПИ-регулятор. Механическая часть ЭП, включающая в себя механизм РО (рабочий орган), редуктор Р и соединительные муфты М.1 и М.2, в общем случае может рассматриваться как многомассовая механическая система с нелинейными упругими связями, [19, 37]. В ряде отраслей промышленности (целлюлознобумажмая, металлургическая, текстильная, химическая и др ) имеются непрерывно-поточные агрегаты, предназначенные для выработки ленточных материалов (бумажное-полотно, стальная полоса, ткань, пленка и др.). К таким агрегатам относятся бумагоделательные машины, непрерывные прокатные станы, текстильные машины, машины, вырабатывающие синтетическую пленку, и др. Непрерывно-поточные агрегаты обычно состоят из ряда отдельных секций, в которых происходит технологическая (механическая, термическая, химическая) обработка материала. Особенностью технологического процесса является одновременность прохождения обрабатываемого материала через. ряд секций агрегата и их взаимосвязь через этот материал, который часто §есматривается как невесомая упругая лента [62, 65]. Рассматриваемые агрегаты характеризуются непрерывностью техно-яигического процесса, отличаются высокой производительностью и яв-яиются поэтому наиболее рациональными и удобными объектами для авто-митн.чации. Здесь часто возникают задачи автоматического управления ско-ии"1тЮ всего агрегата и соотношением скоростей отдельных секций, автома-1нческ()го регулирования натяжения обрабатываемого материала, автомати-яйции ряда вспомогательных операций. Для непрерывно-поточных процес-П1Н dtci.Ma важно применение оптимальных способов управления, совремеи-ниП технологии и оборудования, в том числе электрического. Значительную 11>Л1. м обеспечении высокой производительности таких агрегатов играет ciMtfmii электропривода. В настоящее время наибольшее распространение яд(!Г1, получили многодвягательные СЭП с индивидуальными ТП, питающими якорные цепи приводных двигателей секций. Для автоматического уириилспия скоростями секций и натяжением материала в межсекциоииых 11и)м«жутках применяются системы подчиненного регулирования. 11й рис. 1.2, а показана кинематическая схема трех смежных секций (*ч1(ерывно-поточиого агрегата, связанных через обрабатываемый материал. }1ли вращения механизмов отдельных секций могут применяться одно-, диух и многодвигательные ЭП, что диктуется обычно технологическими ус-лшшнми. Для поддержания постоянства скорости и натяжения материала илн для изменения их по заданному закону должно быть предусмотрено ймтмнтическое регулирование скоростей секций. На рис. 1.2, б изображена 11111циниальиая схема ЭП смежных секций агрегата. ТП получают питание «и ipyiinoBoro трансформатора Тр. Для снижения токов короткого замыкании и нзаимиого влияния преобразователей применены токоограничивающие ррйкгоры ТОР. Автоматическая система регулирования (АСР) скорости ииждой секции является двухконтуриой и состоит из подчиненного контура регулирования тока и внешнего контура скорости с ПИ-регулятором. Ведущее напряжение /7вед. определяющее скорость всего агрегата, чн/кктся с помощью статического ведущего устройства ВУ1 - чаще всего р(ч улнруемого полупроводникового стабилизатора напряжения. Изменение происходит от задатчика скорости ЗС, представляющего собой потей-киимстр с сервоприводом. Для ручной подрегулировки соотношения ско-(iiirirft секций с целью коррекции натяжения обрабатываемого материала ijiyvkiit нотенциометрические задатчики соотношения скоростей ЗСС Диа-iiiijoii изменения выходных напряжений задатчиков соотношения скоростей , должен обеспечивать изменение относительных скоростей секций в тре-flytMiJx пределах - обычно ±(5-5-10)%. Задатчики соотношения ско-1И1 iilt питаются от ведущего устройства (стабилизатора) ВУ2. Число ведущих устройств и характер их связи определяются системой последовательниц) управления, устанавливаемой в ряде случаев на высокопроизводительны» пгрегатах [59]. Назначение системы последовательного управления 111Г10)1г и том, что скорости всех последующих (или всех предыдущих) секции (вменяются одинаково при подрегулировке скорости данной секции. iu использовании в АСР скоростей секций операционных усилителей, ао-11V1 iiJiioiUHx суммирование сигналов на их входах, находит применение схема iiHf лцо.1тельного управления с отдельным ведущим устройством, как это I.......IHIIII ма рис. 1.2, б. Чтобы при изменении скорости агрегата не наруша- I, ус 1,-топленное соотношение скоростей секций, необходимо одинаковое и "И риннг пыходных напряжений ведущих устройств ВУ1 и ВУ2, для чего 1м 1,11Mill CKoiiocTH ЗС воздействует иа оба стабилизатора. Ill 11срмтч1тельиая скоростть отдельных секций агрегата, необходимая и iptiu ijiyi/iimi по технологическим условиям, задается от отдельного источ- .....ui иммыкаиии контакта В. При этом иа данной секции замыкаются i.iumc иомчикты Р, снимающие напряжения С/ведис.с- Необходимо затмит и., мп) аптоматическое регулирование соотношения скоростей секций я11Р(ит(1 .(iHim. косвенно поддерживает натяжение обрабатываемого мате-41И11ЛИ, Поэтому при изменении технологических условий возможно нежела- [0] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 0.0127 |