
|
|
|
Главная -> Математическое описание сэп 0 [1] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 тельное изменение натяжения даже при постоянстве соотношения скоростей секций. Для устранения этого нередко вводятся прямое измерение и регулирование натяжения материала [1, 25, 39]. Для придания ленточным материалам, выработанным на непрерывно-поточных агрегатах, товарного вида, а также с целью повышения качества часто производится их дополнительная обработка на отделочных агрегатах Одрадатыдаемый *) материал (CiJ4tlO) §) (Н-я секция *GI>-с секция (l+lj-n секция 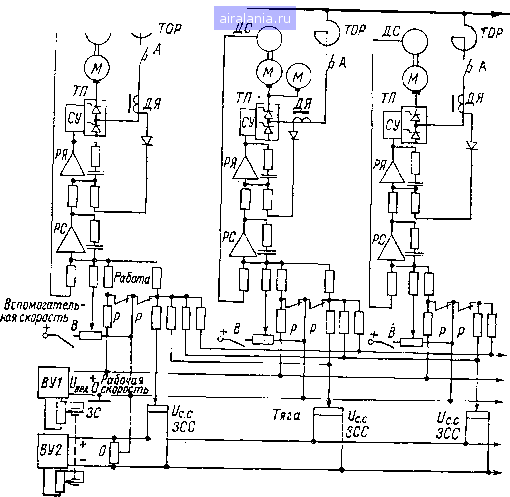 Рис. 1.2. Кинематическая и принципиальная схемы электропривода секций непрерывно-поточного агрегата (продольно-резательные станки, суперкаландры, меловальные машины, правильные машины и др.). Режимы работы таких агрегатов можно отнести к циклическим, связанным с перемоткой первичного рулона с раската (раз-матывателя) на накат (моталку). Цикл работы агрегата обычно состоит из установки первичного рулона на раскат, заправки материала на накат, luntoim (прегата па рабочую скорость с последующим торможением в конце И1ЧиМ1пки. Поскольку разгон и торможение происходят с обрабатываемым м,(111;1лом, а дилназон рабочих скоростей составляет до 10 и более, то и • 11 liiKiix .1грсгато11 предъявляются весьма жесткие требования. В частности, иринод должен обеспечивать поддержание заданного натяжения материала t iini рсчппостью ие выше 5% в статике и 10-15% в динамике. Это требует ИИ I д()>ип1тя соотношения скоростей двигателей с погрешностью, меньшей <1 11Д1111-два порядка, что определяется характером технологического про-нч r;i nil данном агрегате. Столь высокие требования возможно выполнить мри помощи регулируемого ЭП постоянного тока. В последние годы здесь иилучи.ч распространение многодвигательный ЭП с индивидуальными ТП и пиК-мами подчиненного регулирования. 11.1 рис. 1.3 представлена функциональная схема ЭП суперкаландра (< К) для отделки высококачественной бумаги. Механическая часть ЭП со- 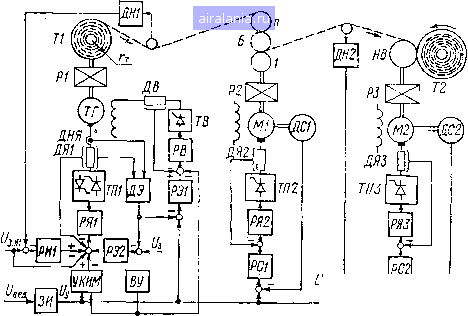 Расиат Капаидр Манат Рис. 1.3. .Функциональная схема электропривода суперкалан- < MMirjo раската, тамбур которого Т1 соединен с тормозным генератором ТГ itiui редуктор Р1 (в частном случае редуктор может отсутствовать), батареи Hiuioi) Б каландра, приводимых во вращение двигателем Ml через ре-itvintip Р2, и периферического наката, несущий вал которого НВ приводи i с я диигателем М2 через редуктор РЗ. V; Тормозной генератор управляется как по цепи якоря, так и по цепи ПН (Луждепия, Якорь генератора подключен к реверсивному тиристорному )ц"иГ)л:и111ателю ТШ, а обмотка возбуждения - к нереверсивному тирис-M<imtiMy иозбудителю ТВ. Преобразователь ТП1 может иметь как согласо- 1"!......с, Ifiit и раздельное управление группами. АСУ по якорной цепи ТГ i(4t4i lui.t контура регулирования: внутренний контур тока якоря с датчи-I iMiwi JlUl И;регулятором тока РЯ1 и внешний контур натяжения бумаж-•мим п,;()Г11л с датчиком натяжения ДН1 (прессдуктором) и регулятором ыIiDMiiiiti . Задание натяжения полотна в статике производится с по-Mi.triiriii ;и1ряжс!1ия Hii поступающего одновременно на вход РН1 и РЯ1-I hi Ир 11 лимне f3. н1 задает ток якоря тормозного генератора в статике /я-т-с i4iiiipi,ift поддерживается затем контуром тока. При этом*регулятор РШ играет роль корректора, и его выходное напряжение в динамике суммируется со знаком плюс или минус с напряжением (/3. „i. Для компенсации влияния механической инерционности привода, с целью более точного поддержания натяжения полотна при пуске и торможении раската служит устоойство компенсации инерционных масс У КИМ. Скорость ЗП суперкаландра определяется значением ведущего напряжения (/вед, а ускорение - задатчиком интенсивности ЗИ. д j АСУ по цепи возбуждения генератора ТГ также имеет два контура регулирования: внутренний контур тока возбуждения с датчиком тока ДВ и регулятором тока РВ и внешний контур ЭДС генератора с датчиком ЭДС Ad и регулятором ЭДС РЭ1. На вход датчика ДЭ поданы сигналы от датчиков тока ДЯ1 и напряжения ДНЯ. Для поддержания постоянства натяжения полотна В процессе размотки поток возбуждения генератора должен изменяться пропорционально радиусу тамбура г, для чего задание тока возбуждения в квазистатическом режиме осуществляется от вычислительного устройства ВУ, определяющего текущее значение диаметра рулона. При этом регулятор РЭ1 играет роль корректора, и его напряжение колеблется около нуля. Для вращения тамбура от генератора ТГ при заправке полотна на агрегате служит контур регулирования с регулятором ЭДС РЭ2. Значение заправочной скорости задается напряжением (/3. Схема ЭП каландра аналогична описанной схеме рис. 1.1. Преобразователь ТП2 выполняется обычно нереверсивным, поток возбуждения двигателя Ml не регулируется. Двигатель М2 наката, также работающий при неизменном потоке возбуждения, питается от преобразователя ТПЗ, который в некоторых случаях может быть реверсивным. АСУ наката имеет три контура регулирования-внутренний контур тока якоря с датчиком тока ДЯЗ и ПИ-регулятором тока РЯЗ, средний контур скорости с датчиком скорости ДС2 (тахогенератором) и ПИ-регулятором РС2 и внешний контур натяжения бумажного полотна с датчиком ДН2 и ПИ-регулятором РН2. Контур натяжения обычно вводится на секциях, где возможно широкое изменение параметров полотна В ходе его технологической обработки. Напряжение (/3 Н2 определяет заданное натяжение полотна на накате. Регулятор РН2 играет роль корректора, и его выходное напряжение изменяется в пределах ±(12)% максимального значения управляющего напряжения Uy, определяющего скорость супер каландра. Аналогичные принципы построения имеют СЭП других отделочных агрегатов целлюлозно-бумажной промышленности (ЦБП). В частности, у ме-ловальных машин вместо каландра установлено несколько прессовых и сушильных секций, АСУ которых идентичны системам регулирования каландра или наката. На продольно-резательных станках (ПРС), наоборот, есть только раскат и накат, причем накат оснащен двумя несущими валами и часто выполняется двухдвигательным. Контур натяжения полотна на накате у ПРС отсутствует, так как АСР натяжения воздействует на раскат станка. Следует заметить, что отделочные агрегаты других отраслей промышленности, хотя и отличаются характером технологического процесса обработки ленточных материалов, имеют, однако, аналогичные задачи управления электроприводом и СЭП таких агрегатов в настоящее время выполняются на базе унифицированных систем подчиненного регулирования. 1.2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ И АДЕКВАТНЫЕ МОДЕЛИ ЭЛЕКТРОМЕХАНИЧЕСКИХ ОБЪЕКТОВ УПРАВЛЕНИЯ Электромеханические объекты управления современных промышленных агрегатов (бумагоделательные и отделочные машины ЦБП, прокатные станы, непрерывно-поточные агрегаты текстильной и химической промышленности) характеризуются весьма слож- НОЙ структурой механической и электрической части. Механическая часть электроприводов часто представляет собой многомассо-1ую крутильную механическую систему с упругими передачами yi, зазорами (с нелинейными упругими связями первого рода). Отдельные секции ряда непрерывно-поточных агрегатов целлюлозно-бумажной, металлургической и других отраслей промышленности связаны между собой через обрабатываемый материал или замкнутые ленты (металлические и синтетические сетки, сукна и др.), представляющие собой разомкнутые или замкнутые упругие связи второго рода. Электрическая часть многодвигательных приводов может быть выполнена с питанием электродвигателей как от общего, так и от индивидуальных вентильных преобразователей, что определяется потребной мощностью секций, диапазоном и точностью регулирования скорости, вопросами унификации электрооборудования и технико-экономическими соображениями. Работа систем электропривода подобных агрегатов характери-:»уется взаимосвязью электромагнитных процессов, механических пилений и технологических факторов, действием внешних (изменение момента сопротивления, напряжения сети, температуры окружающей среды и др.) и внутренних (изменение электромеханических параметров привода) возмущений. Указанные обстоятельства должны быть учтены при математическом описании электромеханических объектов управления и компоновке структурных схем взаимосвязанных систем электропривода. Математические модели СЭП должны содержать существенные параметры и связи реальных ()б1,ектов. При разработке адекватных моделей могут быть исполь-мпиапы различные подходы, в частности основанный на законе г<)хранения энергии, а также приближение частотных и временных чирактеристик математической модели и реальной системы, соче-1!1иие теоретических и экспериментальных методов исследования. Дифференциальные уравнения и структурные схемы электро-м1>хаиических систем нередко нормируются, т. е. представляются и относительных единицах. При этом выбор базовых значений пе-.(м(чи1ых является свободным и может быть осуществлен на ос-нонлнии анализа стационарных режимов работы агрегатов, когда fiimom.imh являются значения переменных в статике [6], или в coin иг гггбии с принципами направленного нормирования [12], когда mpmico планируется сохранить безразмерные коэффициенты пере-.uiiii определенных динамических звеньев равными их абсолют-1II.IM шачспиям с одновременным приведением максимального числа <м м11тн,\ся коэффициентов к единице. Ниже использован первый tiimnif) имбора базовых величин. Дифференциальные уравнения и нормированные структурные »игмм блока двигатель-механизм с упругими связями первого ии1й. применяемый внастоящее время в СЭП промышленных агре-iMHtH иикгродвигателъ постоянного тока с независимым возбужде-imiM 11 (1гц,ем случае может управляться как напряжением якоря, ын н нолем. При составлении дифференциальных уравнений должны быть учтены особенности как якорной цепи и цепи возбуждения двигателя, так и механической системы. В частности, должны учитываться свойства преобразователя, питающего якорь двигателя, реакция якоря, потоки рассеяния, вихревые токи, нелинейность кривой намагничивания двигателя, а также упругости и зазоры механической передачи. Соответствующая схема замещения силовой части ЭП, учитывающая указанные факторы, представлена на рис. 1.4. При этом введены обозначения: Е, R, - ЭДС, внутреннее сопротивление и индуктивность преобразователя, питающего якорь двигателя; £д, ?/?д, - ЭДС, активное сопротивление и индуктивность якорной цепи двигателя; /я, (Од, coj, . . . , (Ом - соответственно ток якоря и скорости двигателя, промежуточных звеньев передачи и механизма; Уд, Ji, . . . , - приведенные моменты инерции двигателя, промежуточных звеньев и ме- 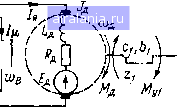 Рис. 1.4. Схема замещения силовой части электропривода ханизма; Zi, сс, bi - приведенные зазоры, коэффициенты жесткости и демпфирования звеньев упругой [механической передачи; Мд, Myi, М(. - моменты; двигателя, упругие в звеньях передачи и сопротивления механизма; U, 1 -напряжение и ток возбуждения двигателя; / - намагничивающая составляющая тока возбуждения, создающая полезный поток двигателя Фд; - приведенное к обмотке возбуждения (ОВ) значение вихревых токов; R, - активное сопротивление и число витков ОВ; Ls - индуктивность, учитывающая потоки рассеяния ОВ; R, - эквивалентное сопротивление контура вихревых токов. При математическом описании "электромеханической системы удобно составлять дифференциальные уравнения для отдельных узлов схемы замещения. Уравнения якорной цепи двигателя. На основании рис. 1.4 можно записать следующее уравнение: Яп-Яд = /яя.ц(7яР + 1), (1.1) где = L,jR.i -электромагнитная постоянная времени якорной цепи преобразователь - двигатель; = La + д; /?я.ц = При переходе к относительным значениям переменных уравнение (1.1) может быть записано в виде „ £д. с р я. ся. ц я» (1.2) 1дее,,=--£,/£л.с,ед = £д/Ед.с;1я = /я я.с; п.с £д.с. /я.с-значения Г1с(1сменных в статике. Представим £п. с &Фд. сСОд. с + я. с/?я. ц 1 + Vc 1 я. СЯ. Ц - k • Ус H-Vc /я.с/?я.ц . k конструктивная постоянная двигателя; *»д,фд.с - угловая скорость и поток возбуждения двигателя и статике. Тогда уравнение (1.2) может быть записано в окончательном виде (1.3) 1я = (8п -,&д). (1.5) (1.6; 1.7) Уравнения цепи возбуждения. Дифференциальные уравнения lUiiH возбуждения двигателя составляются на основании законов Кирхгофа для узла 1 и контуров 1К и 2К схемы замещения (рис. 1.4) (] учетом размагничивающего действия реакции якоря /д=в-/к-Йг.я/я, (1.4) lAt* р,я - коэффициент реакции якоря; в = /в(/в + рЬ,)4-/Л; 1Д0 = Фд в - коэ(фициент прспорциональнссти между по-KiKOM и током возбуждения, определяемый тангенсом наклона ка-гктольной к кривой намагничивания Фд = / (4) в рабочей точке. При переходе к относительным значениям переменных уравне-IIIK (1.4) можно записать в виде i = в-1к-Vfl» (1-S) / в. с в. с ВС в. с Г()дп уравнение (1.5) будет «в=1в(Г,р + 1)+41к, (1.9) 1/1» Г, - LJRs - постоянная времени потока рассеяния; Ub = Урмткпие (1.6) примет вид йУвФд.сРФд-/е.ск1к = 0, (1.10) tar 1, Фд/Фд.с. 0 [1] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 0.0075 |