
|
|
|
Главная -> Математическое описание сэп 0 1 2 3 4 5 6 7 8 9 10 11 12 [13] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 = 4/(VitOyi), обеспечивающий 5%-ное перерегулирование скорости секции при ступенчатом изменении щ. На входы СЭП остальных секций также следует включить фильтры с Ti = 7 . При этом секции, имеющие большие значения oi.i, в начальный период переходного процесса будут несколько опережать секции с меньшими сосг а в конце переходного процесса - несколько отставать, что обеспечит наименьшие деформации обрабатываемого материала при изменении скорости агрегата. При выборе ступеней и скорости изменения иед необходимо стремиться к тому, чтобы в переходном процессе отсутствовало как ограничение выходных напряжений регуляторов скорости секций, так и ограничение токов двигателей нулевым значением в случае применения нереверсивных вентильных преобразователей. В противном случае будет наблюдаться размыкание СЭП, что может привести к недопустимому растяжению или обрыву материала при действии возмущений в период управления скоростью агрегата. Допустимое ступенчатое изменение иед в процентах, при котором отсутствуют ограничения, может быть определено по формуле Диед,- =--100, (2.58) где Кф1 - коэффициент, учитываюший включение фильтра на входе АСР и определяемый по графику, приведенному в нижней части рис. 2.10. По формуле (2.58) рассчитываются значения Двед* Для всех секций агрегата и находится минимальное значение Aub для некоторой, k-й, секции, которое сравнивается с допустимым ступенчатым изменением Дивед.д, определяемым технологическими требованиями в каждом конкретном случае. Окончательное решение, определяющее требования к дискретности напряжения задат-чика уровня скорости агрегата, принимается по наименьшему из значений Двед/. и ДУреД.д. Период переключения ступеней Ди.ед определяется длительностью экспоненты 1)3.,, (О на выходах фильтров, равной /р л; I2/(Vj tOyi). Тогда скорость изменения в процентах в секунду при Дигед?>ДJEeд. д определястся формулой вед вед.д V?i COyi (2.59) (2.60) dt 12 а при Ди;зед/;<Дивед. д - соответственно <"Еед 16,7/Сфй Vд\ (Hyi Tu-Lk VЯк Wyft Если окажется, что базовая секция с минимальной частотой среза 0)с1 имеет и минимальное значение ДУвед, то формула (2.60) примет вид сгУвед 40 (2.61) Если ведущее напряжение изменяется не ступенчато, а более плавно, что определяется устройством задатчика скорости, то предложенные рекомендации обеспечат лучшие условия управления скоростью агрегата. Динамика многодвигательных СЭП агрегатов циклического действия. К циклическим агрегатам с разомкнутыми упругими связями второго рода относятся многие агрегаты, производящие отделку ленточного материала (продольная и поперечная резка, отделка поверхности и т. п.) после выработки его на непрерывно-поточном агрегате. В отделочных агрегатах в настоящее время применяются многодвигательные ЭП постоянного тока с индивидуальными тиристорными преобразователями (ТП) и системами подчиненного регулирования. Работа таких ЭП характеризуется взаимосвязью электрических и механических факторов, влиянием упругости обрабатываемого материала, действием различного рода возмущений (момент сопротивления, эксцентриситет механизма и др.) и естественной вариацией параметров системы при изменении режима работы агрегата. Все это существенно осложняет коррекцию СЭП и в связи с возросшими требованиями к динамике систем заставляет искать новые пути построения и оптимизации СЭП отделочных агрегатов. Проблемы СЭП таких агрегатов рассматриваются ниже на примере продольно-резательных станков и суперкаландров, предназначенных для отделки бумаги и картона. Оптимизация динамики унифицированных СЭП продольно-резательных станков (ПРС). ПРС предназначены для продольной резки бумажного или картонного полотна, поступающего в виде первичного тамбура с бумаго- или картоноделательной машины. При этом тамбур устанавливается на раскате станка, бумажное полотно заправляется на накат, состоящий из двух приводных несущих валов и тамбурного валика, а затем производится пуск ПРС на рабочую скорость. По достижении разрезанными рулонами на накате заданного диаметра происходит торможение ПРС. Основной задачей СЭП является поддержание заданного натяжения обрабатываемого полотна как при установившейся скорости, так и в периоды пуска и торможения станка. С этой целью раскат снабжается тормозным генератором (ТГ). ТГ и двигатели несущих валов подключаются к индивидуальным ТП, чаще всего в реверсивном исполнении. ТГ управляется как напряжением якоря, так и потоком возбуждения, двигатели несущих валов - только напряжением якоря. Для поддержания заданного натяжения бумажного полотна на раскате применяется АСР натяжения (АСРН) прямого или косвенного действия. В первом случае используется прямое измерение натяжения полотна с помощью датчиков натяжения, чаще всего прессдукторных [391. Для поддержания заданной скорости станка накат снабжается АСР скорости (АСРС). Как АСРН, так и АСРС имеют структуру систем подчиненного регулирования [13]. Рассмотрим наиболее перспективную СЭП продольно-резательного станка с прямым регулированием натяжения полотна. При математическом описании динамики СЭП будем использовать НСС, полученные выше для многодвигательных приводов с упругими Раскат 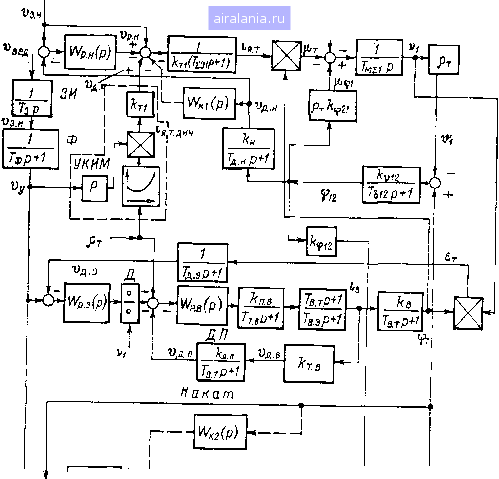 Wpa(p)
 Рис. 2.П, Нормированная структурная схема электропривода ПРС связями второго рода. На рис. 2.11 представлена нелинейная НСС электропривода ПРС, включающая в себя раскат с контурами регулирования ЭДС тормозного генератора и натяжения полотна (АСРН) и двухдвигательный накат с контурами регулирования скорости двигателей (АСРС). На рисунке введены следующие обозначения: Wp.„(p), р.э(р), Wp.Ap). р.Лр), Wk (р) - переда-84 точные функции регуляторов натяжения, ЭДС, тока возбуждения, скорости и корректирующих звеньев; k, п. в> Vn» К> ф, •т> Лг. в. -коэффициенты передачи: между током возбуждения и потоком ТГ, тиристорного возбудителя, датчика потока, механико-технологические полотна, обратных связей по токам якоря, возбуждения и натяжению полотна; Tms. Тв. э. Т, Гт. в, Г э, Тв, Гз, Гф, Г постоянные времени: механические, . Д.н» д. э возбуждения, вихревых токов, тиристорного возбудителя, эквивалентные малые АСР, удлинения полотна, задатчика интенсивности, фильтра, датчиков натяжения и ЭДС; рт - радиус тамбура раската; fe„i-- коэффициенты распределения нагрузок двигателей; 1>з, „, ид. н, Уд. э. «д. в, Уд. п - напряжения: "пед» 3. и» Uy» >д. к> задатчика натяжения, ведущее, задатчика интенсивности, управляющее, динамической компенсации, регуляторов натяжения и скорости, датчиков натяжения, ЭДС, тока возбуждения и потока; ц,, 1б - токи якоря и возбуждения; v, # - скорости машин и полотна; - натяжение полотна; р-т, р-ф, Рсо - моменты: ТГ, натяжения полотна и холостого хода; фх, ет- поток и ЭДС тормозного генератора. Для управления режимами разгона и торможения станка служат задатчик интенсивности ЗИ и апериодический фильтр Ф, для ;1адания требуемого значения динамического тока ТГ - устройство компенсации инерционных масс УКИМ, содержащее дифференциатор Р, нелинейное звено и блок произведения, НСС наглядно отражает взаимосвязь электроприводов раската и наката через упругое бумажное полотно (упругость второго рода). При этом предполагается, что действие упругости механических передач (упругость первого рода), если оно существует, подавлено /С-коррекцией. Рассмотрим принципы оптимизации системы. При определении передаточной функции объекта регулирования контура натяжения необходимо рассматривать взаимосвязанную систему с учетом того, что механическая инерционность наката Гм 2 компенсируется н АСРС. Тогда передаточная функция между [х-т и ц), соответствующая НСС (рис. 2.11), может быть представлена в виде (2.62) где А = у12ф12 (ртГмгг + Ti); В = кгКх- Записывая характеристическое уравнение (2.62) в виде T\qP + I 2о7уоР +1 = 0, можно найти частоту соуо и коэффициент демп-г)прования 1о упругих колебаний второго рода: (ОуО = 0 О (2.63) Из анализа формул (2.63) следует, что при снижении скорости nPL колебательность системы пропорционально возрастает. Обычно соуо = 10-Г-20 с~\ 0 -= 0,05-7-0,5 (меньшие значения соответствуют нижним скоростям ПРС). Относительное изменение и в процессе размотки тамбура на данной скорости ПРС составит ts)yo = (2.64) где индексы «н» и «к» обозначают соответствующие параметры в начале и конце размотки тамбура. Оптимизация СЭП должна быть выполнена с учетом естественной вариации параметров электропривода. Слабость перекрестных связей между контурами ЭДС тормозного генератора и натяжения дает возможность рассматривать динамику контуров независимо друг от друга. Контуры тока возбуждения, ЭДС и тока якоря могут быть настроены на ОМ как в жесткой системе, т. е. без учета упругих связей. При этом для линеаризации контуров тока возбуждения и ЭДС включаются датчик потока ДП и делитель Д (рис. 2.11). Передаточная функция разомкнутого контура натяжения будет ро (Р) = Гр., (р) Wq (р) Ро ---«Wp)- т«Р й.п(Геэ1Р+ 1И7д.нР-Ы) (2.65) где Ро. то - динамический коэффициент усиления и постоянная времени ПИ-регулятора натяжения (РН). Коррекция АСРН в простейшем случае может быть выполнена путем перестройки РН и выбора рационального соотношения между соуо и l/To, где Г20 = Тд. „ -f- Гэь Устойчивость системы обеспечивают следующие условия: й TiaipTzotoyo Ро---- 20 - V2I0 (2.66) При этом частота среза разомкнутого контура натяжения соо 0,7Vot«>yOr что составляет в среднем 1-2 с~. В ряде случаев полученное быстродействие АСРН не удовлетворяет предъявляемым требованиям, поэтому необходимо ввести коррекцию, подавляющую влияние упругости полотна. Среди возможных способов коррекции наиболее эффективным является использование гибкой отрицательной обратной связи по Уд. „, реализуемой с помощью дифференцирующей iC-цепи первого или второго порядка. Будучи введенной на вход РН, имеющего ограничение выходного напряжения, предлагаемая /?С-коррекция обеспечивает надежность эксплуатации и стабильность работы в условиях изменения параметров системы. После структурного переноса корректирующей связи на вход токового контура (рис. 2.11) ее передаточная функция может быть представлена в виде W-ki(p)-Pki "1 • (2.67) Параметры pi и ti выбираются из условий начала размотки по формулам, синтезированным частотным методом: 10 V2 knk((>2l . Тк1 = (2.68) что обеспечивает оптимальное подавление упругих колебаний в процессе обработки полотна. Параметры РН соответственно выбираются по условиям: л/2 кпг 1 уо (2.69) 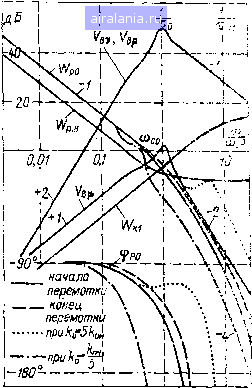 Рис. 2.12. Логарифмические частотные , характеристики АСРН раската ПРС Нормированные логарифмические частотные характеристики АСРН раската представлены на рис. 2.12. Частота среза ЛАХ Wo составляет соо - (0,5-f-0,7) Шуо при запасе по фазе характеристики фро = 60-70° в процессе размотки полотна. Предложенные настройки РН и /?С-коррекции обеспечивают также достаточную стабильность динамики АСРН при изменении параметров бумажного полотна. Хотя колебательность системы при снижении коэффициента kv и возрастает, однако даже пятикратное изменение k„ в ту и другую сторону относительно начального значения kn не приводит к неустойчивости АСРН. Основными возмущениями, действующими на раскат, являются изменения момента сопротивления \Icqi, скорости наката и радиуса тамбура рт (эксцентриситета раската). Соответствующие передаточные функции по возмущениям, полученные по НСС (рис. 2.11), будут Vip) -JhlSPL - /ог(Р)..... . 2.70) рсп1 (Р) [W-p.h(P)-f W-k.i(P)]Wt (Р) /?тг(72:э1Р +1)(Тд.„/?+1) 0 1 2 3 4 5 6 7 8 9 10 11 12 [13] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 0.0021 | ||||||||||||||||||||||||||