
|
|
|
Главная -> Математическое описание сэп 0 1 2 3 4 5 6 7 8 9 10 11 12 13 [14] 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 у.Ар) 9ia(p) 2(Р) (2.71) VsAp)-- =-F3,(p)v(-P + lY (2.72) Voi (Р) = Соответствующие ЛАХ V,, Vy и Кр приведены на рис. 2.12, Анализ характеристик говорит о том, что возмущения и рт в зоне существенных частот системы являются эквивалентными и значительно более «сильными», чем возмущение ficoi- Возможности компенсации этих возмущений проанализированы ниже. Рассмотрим оптимизацию АСР скорости наката. В работе [13] рекомендуется настраивать контур скорости с учетом упругости обрабатываемого полотна. Следует заметить, что при подавлении упругих колебаний в системе за счет действия АСРН коррекция АСРС может быть выполнена без учета влияния упругости второго рода. При этом быстродействие контуров скорости выбирается одинаковым для устранения между несущими валами нежелательных уравнительных моментов, передаваемых через наматываемый рулон. В простейшем случае ПИ-регуляторы скорости с передаточными функциями Wp.,,(p)..Pi,ii настраиваются на ОМ в начале намотки, при этом (2.73) (2.74) а частота среза контуров скорости со,,! == 1/(2Г2э). В процессе намотки рулона вследствие увеличения 722 быстродействие АСРС будет снижаться. Степень снижения быстродействия АСРС зависит от конечного диаметра наматываемых рулонов и практически может составлять до 25%. Если это нежелательно, то для стабилизации динамики системы следует настроить PC на СО в конце намотки (Ti = АТ) и ввести два корректирующих ПД-звена (см. рис. 2.11) с передаточными функциями к. (Р) = Ki lOKt-P (TKtP + 1) (10тк,-р+1)(0,1ад+1) (2.75) "Ki - 723» (2.76) и параметрами что обеспечивает перевод контуров скорости из СО в ОМ. Такая 88 коррекция, описанная в § 2.1, вьшолняется с помощью активных ПД-звеньев и обеспечивает при управляющем воздействии изменение Va, идентичное настройке на ОМ, а при возмущении снижение динамической ошибки Vamax на 22% при одинаковом с настройкой на СО времени переходного процесса. Кроме того, предлагаемая коррекция существенно снижает чувствительность АСРС к уменьшению 7м22. Пуск и торможение ПРС происходят с помощью задатчика интенсивности, на выходе которого целесообразно включить фильтр с постоянной времени 7ф > 10 72э, что обеспечивает ограничение рывка при трогании станка. Устройство компенсации инерционных масс (УКИМ), применяемое в ПРС, обычно управляется напряжением Uy, как это показано на рис. 2.11. При задании динамического тока 1я. т.дин такое УКИМ не учитывает % инерционность контура тока ТГ и контуров скорости наката, характеризуемую соответственно 72э1 и 72э- Кроме того, УКИМ не может компенсировать колебания V2, обусловленные возмущениями на накате (изменение р.,02> эксцентри- jrT ситет несущих валов и др.). w \ \ . Более целесообразным является вклю- -4 чение УКИМ не на Оу, а на (прак- ----8 Рис. 2.13. Переходные процессы изменения натяжения бумажного полотна при пуске ПРС 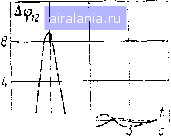 с поедлагаемым 1ШМ тически на выход датчика скорости наката), что позволяет задавать динамический ток раската пропорционально изменению V2 и тем самым компенсировать инерционность 7x9 и возможные колебания скорости наката. Для проверки такого решения были проведены исследования динамики ПРС машинными методами в режимах пуска и торможения, а также при ступенчатом и гармоническом изменении 1x02- На рис. 2.13 представлены полученные на ЦВМ переходные процессы изменения при пуске станка с обоими способами включения УКИМ, подтверждающие целесообразность предлагаемого решения. При гармоническом изменении ,(02 с частотой (Оуо, что является наиболее тяжелым случаем механического резонанса, удалось при этом снизить амплитуду колебаний фг2 примерно на порядок. Если на раскате наблюдается значительное влияние эксцентриситета тамбура, то это возмущение в принципе также может быть скомпенсировано с помощью УКИМ, входом которого является датчик радиуса тамбура Дрч-. Экспериментальные исследования взаимосвязанной системы проводились на ПРС Светогорского ЦБК. Станки предназначены для обработки кабельной и телефонной бумаги, ширина станков 4,6 м, максимальная скорость = 1200 м/мин. ПРС оснащены тиристорным электроприводом и системой прямого регулирования натяжения бумажного полотна. Коррекция многосвязной системы ПРС была выполнена в соответствии с разработанными выше рекомендациями. Исследования подтвердили отсутствие влияния упругости полотна на АСРС в оптимизированной системе и эффективность введения /?С-коррекции. На рис. 2.14 представлены осциллограммы изменения напряжения датчика натяжения (/д. при пуске ПРС с кабельной бумагой, 1 м которой имеет массу 90 г, при отсутствии
Писк ПРС с RC - коррекцией ь-ZZ Ml мин 7 ..=л I г 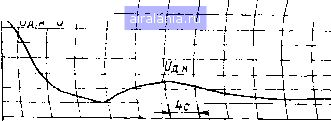 Рис. 2.14. Осциллограммы выходного напряжения датчика натяжения при пуске ПРС и наличии коррекции. До введения коррекции на осциллограмме четко видны упругие колебания второго рода с частотой йЗуо 24 с~\ в особенности в области электромеханического резонанса. После включения /?С-коррекции первого порядка упругие колебания оказались полностью подавленными, что дало возможность увеличить быстродействие АСРН в 5 раз и обеспечить необходимое качество динамики многосвязной системы. построение и оптимизация вентильных сэп суперкаландров (ск). СК предназначены для отделки (усиления прочности и лоска) высококачественных писчих и печатных бумаг. Ош представляют собой отдельные агрегаты, на которые бумажное полотно поступает с бумагоделательной машины в враде первичного тамбура. Максимальные скорости СК в настоящее время достигают 9СЮ м/мин, диапазон регулирования рабочих скоростей составляет до 1 : 20. Цикл работы СК состоит из заправки полотна с раската через батарею валов на накат, пуска на рабочую скорость и торможения в конце перемотки тамбура. Рассмотрим динамику многодвигательного вентильного ЭП суперкаландра, функциональная схема которого приведена на Раскат 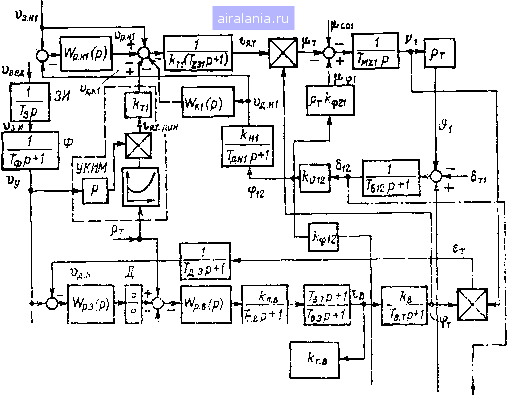
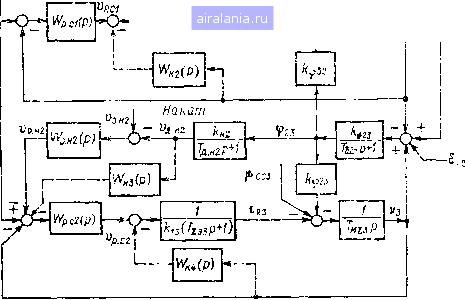 Рис. 2.15. Нормированная структурная схема электропривода суперкаландра рис. 1.3. На рис. 2.15 показана соответствующая нелинейная НСС привода СК, включающая в себя осевой раскат с контурами регулирования ЭДС тормозного генератора и натяжения полотна (АСРН раската), многовальный каландр с регулированием ско- рости главного двигателя (АСРС) и периферический накат с внешним контуром натяжения полотна (АСРН наката). По сравнению с НСС продольно-резательного станка (см. рис. 2,11) здесь введены дополнительные обозначения: б - удлинение полотна; Тз - постоянная времени «чистого» запаздывания зон сцепления (прижима) полотна с валами каландра; Т - эквивалентная постоянная времени межвалковых промежутков каландра; бт - технологическое возмущение (усадка, вытяжка полотна). Для управления режимами пуска и торможения СК предназначены задатчик интенсивности зи и апериодический фильтр ф, для задания требуемого значения динамического тока ТГ - устройство компенсации инерционных масс уким, выполненное аналогично таковому на ПРС. На НСС видна взаимосвязь электроприводов раската, каландра и наката через бумажное полотно (упругость второго рода). При этом предполагается, что влияние упругости механических передач (упругости первого рода) подавлено с помощью активных фильтров или /?С-коррекции. Механическая часть электропривода СК с упругими связями второго рода в общем случае является трехмассовой системой, которая ввиду значительной механической инерционности каландра распадается на две двухмассовые системы: раскат-каландр и накат-каландр. При оптимизации АСРН раската необходимо учитывать, что механическая инерционность каландра компенсируется АСРС. Принимая также во внимание слабость перекрестных связей между контурами ЭДС тормозного генератора и натяжения, можно записать передаточную функцию разомкнутого контура натяжения в виде Р01 (Р) = Wp. .а (р) wo (р) = Ро1 " X ToiP Рт211 (Tloif -f 2oi7yoiP + 1) (TzsiP + l) (д.нР H- 1 (2.77) где poi» Coi - динамический коэффициент усиления и постоянная времени ПИ-регултяора натяжения; Гуоь oi - постоянная времени и коэффициент демпфирования упругих колебаний раската, определяемые по формулам (2,63). 1 Коррекция АСРН раската СК может быть выполнена аналогично таковой ка ПРС как без применения, так и с применением /?С-коррекции, подавляющей влияние упругости полотка. В последнем случае быстродействие АСРН получается выше. Контуры тока возбуждения и ЭДС настраиваются на ОМ. Для их линеаризации включены датчик потока дп и делительД (рис. 2.15). Динамика ЭП раската СК при действии внешних(изменение \icoi, Vg) и внутренних (изменение fe„i2» Рт) возмущений будет идентична рассмотренной для ПРС. Наиболее «сильными» возмущениями и здесь являются и рт, способы компенсации которых приведены ниже. Рассмотрим оптимизацию СЭП наката. Контур тока якоря настраивается на ОМ как в жесткой системе. ПИ-регулятор скорости с передаточной функцией (2.73) ввиду достаточно большой механической инерционности наката настраивается на СО (в локальной системе). При этом параметры PC Сбудут р12 = Ti2 4Г2э2, (2.78) Реальное изменение Тмз в процессе намотки рулона может составлять до 50%, что приводит к некоторому увеличению колебательности контура скорости. С целью получения оптимальных характеристик контура и стабилизации динамики системы при значительном изменении Гмз может быть введена корректирующая связь с передаточной функцией w {р) (рис. 2.15), определяемой выражением (2.75) и параметрами (2.76), что позволяет перевести настройку скоростного контура из СО в ОМ при управлении Uy с одновременным улучшением переходных процессов при возмущении jxcos- Параметры корректирующего ПД-звена выбираются в конце намотки тамбура. Наличие натянутого бумажного полотна на накате существенно изменяет характеристики локального контура скорости. Передаточная функция разомкнутого контура в многосвязной системе [без коррекции 1к4 (р) будет 1р1м(р)-=р.,2(р) .Л2Л;з (7у02Р+ 2о2у02Р + О 12з;Р + о (2.79) где Туо2, 02 ~ постоянная времени и коэффициент демпфирования упругих колебаний наката. Наличие в (2.79) выражения, описывающего колебательное ;uieHo, и характеризующего влияние упругости второго рода, может приводить к неустойчивости как контура скорости, так и АСРН наката. Для предотвращения этого необходим соответствующий выбор величины Тэз, а также структуры II параметров регулятора натяжения (РН). При отсутствии специальных корректирующих устройств, предназначенных для по-дмвления упругих колебаний С0уо2, величина Тэз = • ((Оуо2л/2)~- В качестве РН целесообразно применить скор-Р1кгнрс)ванный ПИ-регулятор с передаточной функцией ТогР (TiaP + 1) (2.80) 93 0 1 2 3 4 5 6 7 8 9 10 11 12 13 [14] 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 0.0087 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||