
|
|
|
Главная -> Математическое описание сэп 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [17] 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 видно, что до введения /?С-коррекции первый вал имеет значительные упругие колебания (сплошная кривая), которые подавляются JC-коррекцией (штриховая линия). В кривой скорости второго вала упругие колебания не заметны вследствие его большой инерционности. При £/21>0,5 в худших условиях оказывается привод второго вала, а отсутствие обратной связи по скорости затрудняет борьбу с его упругими колебаниями. Введение ЯС-коррекит по скорости двигателя первого вала и здесь позволяет несколько снизить влияние упругой связи, если не превосходит Гхз более чем в 3-5 раз. В противном случае может потребоваться введение коррекции по скорости вспомогательного двигателя, что сопряжено с установкой на его валу отдельного тахогенератора. Динамика СЭП с упругими связями первого и второго рода. Таблица 2.2 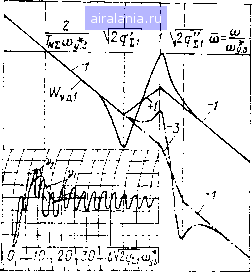 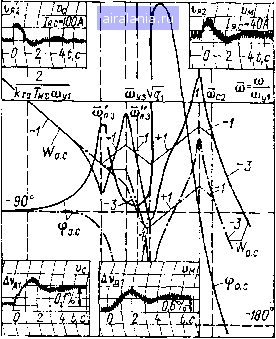 Рис. 2.18. Логарифмические частотные и переходные характеристики СЭП с замкнутой упругой связью второго рода Рнс. 2.19. Логарифмические частотные и переходные характеристики СЭП с общим преобразователем Рассмотрим теперь"систему ЭП с общим преобразователем с учетом упругих связей первого и второго рода. Степень влияния на динамику АСР упругих связей первого и второго рода определяется рядом факторов; соотношением частот соу, соу. з и toi = l/T], величиной дъ коэффициентами демпфирования и 1з, а также частотой среза системы (ni, В частности, при qi == 0,5, как это отмечено выше, влияние упругой связи второго рода практически отсутствует. В табл. 2.2 приведены условия доминирующего или взаимного влияния упругостей первого и второго рода, а также приближенные оценки несущественности такого влияния, полученные на основании исследования системы (см. рис. 2.17, б) частотным методом.
Экспериментальные исследования секций в «общей одежде» бумаго- и картоноделательных машин позволили установить доминирующее влияние упругих связей первого рода, что соответствует случаю сОу. з<(021<у Параметры упругих колебаний первого и второго рода составили: Шу = 40-80 с~, I = 0,03-0,1 и (Оу.з = 5-Г-10 с-\ 3 = 0,10,5, причем упругие колебания второго рода были более заметны на нижних скоростях приводов. На рис. 2.19 представлены нормированные логарифмические частотные характеристики объекта регулирования, построенные по выражению (2.102) без учета инерционности ДС. При этом сплошными линиями показаны характеристики для <?2i<0>5, а штрихпунктирными - для £1>"0,5. При 21<0.5 ЛАХ Wo. с имеет два]fрезонансных провала и пика, причем резонансные всплески на частотах Шп. з и Шу. з (ш = = co/coyi), возрастающие при снижении скорости привода, обусловлены влиянием упругой связи второго рода, а резонансные всплески на частотах и ш = 1 - влиянием упругости первого рода. При коррекции динамики СЭП в первую очередь следует по. давить резонансный пик на частоте со = 1, чтобы избежать автоколебательного режима работы привода. Наличие резонансного пика на частоте (0у. 3 является с этой точки зрения неопасным, поскольку в области о)у. 3 система имеет достаточный запас по фазе. Оптимизация динамики системы в принципе может быть проведена как без применения, так и с применением специальных корректирующих устройств, предназначенных для подавления упругих колебаний. В первом случае стремятся достичь требуемого качества динамики СЭП путем перестройки PC и рационального выбора величины Ti. Ввиду значительного подъема резонансного пика ЛАХ объекта на частоте toyi постоянную времени Ti следует выбрать по формуле Tzi (л/2Е0)у.з)~\ (2.117) что приводит к снижению резонансного пика ЛАХ в f0yi/(V22i у-ъ) раз и дает возможность достичь при данных условиях максимального быстродействия АСР. Параметры ПИ-регулятора скорости целесообразно выбрать по формулам (2.116), что обеспечивает характеристики системы, близкие к таковым при настройке на СО, при частоте среза со « 0,5 V2c?si toy.3. Для секционных приводов бумаго- и картоноделательных машин сО(-1 составит в среднем 3-5 с"" Если при этом наблюдается заметное влияние упругости первого рода, то для его снижения следует ввести на выход PC активный режекторный фильтр, настроенный на частоту tOyi, или RC-коррек-цию по скорости основного двигателя. В последнем случае параметры /?С-коррекции выбираются по формулам: к2л/2 Й,о7221г03у1; = (2o>yi)-i, (2.118) что обеспечивает оптимальное подавление упругих колебаний скорости основного двигателя. При g2i>0-5 резонансный пик ЛАХ Wq, объекта на частоте tOy. 3 выражен менее ярко, а пик на частоте tOyi располагается ниже, чем в предыдущем случае. Однако наличие крутопадающего участка фазовой характеристики фо. в зоне существенных частот препятствует увеличению быстродействия СЭП. Кроме того, при коррекции системы необходимо обеспечить удовлетворительное подавление упругих колебаний скорости как второго рабочего вала, так и двигателя этого вала. В соответствии с изложенным постоянную времени 71 целесообразно выбрать по формуле (2.117), а параметры PC - по условиям: Pi-0,25ToTMsV2<Oy.3; Ti=--, (2.119) что обеспечивает характеристики СЭП, близкие к таковым для на-108 стройки на СО, при частоте среза 0,5 V2s2 Щ.г- При заметном влиянии упругости первого рода и в рассматриваемом случае полезно введение активного фильтра или С-коррекции. Необходимо отметить, что при qi w 0,5 или при tOy. з соу в ЛАХ Wo. с наиболее ярко будет выражен провал на частоте ViWyi, относительно которого и выбирается [частота среза системы coci- Оптимизация динамики АСР в этих случаях аналогична таковой для систем, имеющих только упругие связи первого рода (см. § 2.2). Характеристики СЭП будут близки к таковым для настройки на СО при «схЛО.б д/1 у1- В рассматриваемой СЭП при изменениии момента сопротивления механизма pcoi нарушается установленное соотношение нагрузок двигателей, что является нежелательным. Уравнения статики, составленные по НСС (рис. 2.17, а), позволяют найти соответствующие параметры: Ът. п.с - 1 PcOl -f ]с02 1я1я2я21г2 + (1 - Я1я2я12я21)1} X X {й1;ф(я1 +М -Ья1я2[.2-Л(я12 f 32l)]}~; Я2 (%-П.С - Я12ЛС01) - МСОЗ . kvk(p (1 - Я2Я12) i Я2е2 (2.120) ф12с = - ф21с ---- . •-яхс = P-coi-2/гфф12с; ЯЗС !С02 + 2фф12с- при абсолютно жесткой ленте {k = о) Vд2c = О, что соответствует прижиму рабочих валов. Из выражений (2.120) также следует, что более мощный двигатель с датчиком скорости на валу имеет больший процент изменения тока, т. е. 1я1с>я2с- Для поддержания соотношения нагрузок двигателей необходимо ввести автоматическое регулирование потока вспомогательного двигателя (см. рис. 2.17, а). При этом контуры тока возбуждения и тока якоря двигателя настраиваются на ОМ [59 3. Для более полного изучения динамики АСР при управляющих II возмущающих воздействиях и различном сочетании параметров проводилось моделирование на АВМ двухдвигательного ЭП с общим преобразователем и регулятором потока вспомогательного двигателя. Схема набора на АВМ компоновалась по НСС, приве-доппой на рис. 2.17, а, в соответствии с известными правилами структурного моделирования. Параметры объекта соответствовали ЭП прсчсовой секции в общей «одежде» высокопроизводительной БМ 11)тк)й 7 м. На верхней рабочей скорости, равной 750 м/мин, ипрммотры объекта были: Г, 43 с, kj = 100, = \, = U.3 с, 7, q,, 0,1, cOyi - й)у2 50 с~, 1 = 1 = 0,0Ь, Юу. 3 = 10 3 = 0,17. Исследования взаимосвязанной системы проводились на верхней и нижней рабочей скорости ЭП (диапазон регулирования 1 : 3) при i = 0,2 и i = 0,8, что дало возможность рассмотреть наиболее неблагоприятное сочетание параметров привода в отношении влияния упругих связей. Настройки регуляторов выбирались в соответствии с вышеизложенными рекомендациями. Для подавления упругих колебаний была введена /?С-коррекция по скорости основного двигателя секции. На рис. 2.20 представлены осциллограммы переходных процессов по скоростям двигателей при ступенчатых управляющем щ = = 0,15% (кривые 1) и возмущающем fXcoi = 10% (кривые 2) воздействиях на нижней скорости ЭП. На рисунках видно остаточное отклонение скорости Vj2c вспомогательного двигателя при 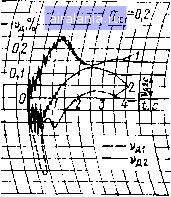 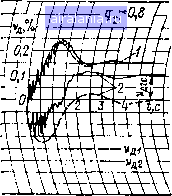 Рис. 2.20. Переходные характеристики СЭП с общим преобразователем при управлении и возмущении действии возмущения, что соответствует уравнениям статики (2.120). Благодаря действию /?С-коррекции упругие колебания первого рода основного двигателя подавлены полностью. Ввиду отсутствия обратной связи по скорости вспомогательного двигателя его упругие колебания весьма заметны. На осциллограммах также наблюдается влияние упругости второго рода на вал с меньшей механической инерционностью. Полученные результаты показывают, что реально достижимое быстродействие АСР при qi = 0,2 и =0. приблизительно одинаково. Экспериментальные исследования прессовых секций в общей «одежде» проводились на бумагоделательных машинах Я» 9 и 10 Сегежского ЦБК. Эти машины предназначены для выработки мешочной бумаги, 1 м которой имеет массу 80 г, с обрезной шириной полотна 6,3 м; максимальная рабочая скорость 750 м/мин, диапазон регулирования 1 : 3. Привод первого пресса выполнен с общим тиристорным преобразователем и регуляторами потока вспомогательных двигателей; при этом структура взаимосвязанной СЭП фактически соответствовала НСС на рис. 2.17, а. Исследования прово- дились как на рабочей скорости БМ = 500 м/мин, так и на вспомогательной скорости = 35 м/мин. Параметры объекта на рабочей скорости составили; Tms = 20 с, = 100, = 2, 76 = = 0,5 с, qi = 0,06, 2 = 0,02, 21 = 0,6. Настройки регуляторов соответствовали расчетным, для снижения влияния упругости первого рода в контур скорости основного двигателя был введен ре-жекторный фильтр. В верхней части рис. 2.19 показаны осциллограммы изменения тока 1я2 вспомогательного двигателя сукномойки, а в нижней части рисунка - осциллограммы изменения скорости Vpj основного двигателя пересасывающего вала при ступенчатом управляющем воздействии «з.с на рабочей и вспомогательной скоростях БМ. В кривых скорости основного двигателя заметно присутствие высокочастотной составляющей с частотой /yi « 6 Гц, обусловленной влиянием упругости первого рода. Отсутствие влияния упругости второго рода может быть объяснено соотношением инерционных масс секции = 0,6, близким к оптимальному значению 0,5. При этом реально достижимое быстродействие СЭП, характе-ризуемое частотой среза, составляет cod л; 0,5 Vi 2n/yi = 0,5 V0,062n-6 л; 4,6 с- или время первого согласования при управлении » 2/шс1 0,43 с. Общий характер переходных процессов близок к таковому для настройки на СО при времени регулирования около 2 с, что соответствует теоретическим расчетам и обеспечивает требуемое качество динамики многосвязной системы. Оптимизация СЭП с индивидуальными преобразователями. На рис. 2.21 изображена НСС «-двигательного ЭП секции с индивидуальными тиристорными преобразователями. Соответствующие обозначения были приведены выше. Контуры тока якорей двигателей, настроенные на ОМ, представлены в свернутом виде с передаточными функциями 32 1 (р), где I = 1, ... , п. динамика сэп с упругой связью второго рода. Рассмотрим систему двухдвигательного ЭП при условии пренебрежения упругостью первого рода. С учетом многосвязности механической части привода через замкнутую упругую связь второго рода и необходимости компенсации каждым регулятором скорости «своей» механической постоянной времени передаточная функция объекта регулирования каждого контура скорости будет иметь вид где I, = 1 или 2, причем i ф к. 2kxik( 2ккц, (2.121) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [17] 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 0.1735 |