
|
|
|
Главная -> Математическое описание сэп 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [18] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 Анализ выражения (2.121) показывает, что влияние упругой связи сказывается в большей степени на локальной системе с меньшей механической инерционностью, поэтому при коррекции СЭП необходимо обеспечить подавление упругих колебаний в этой системе. При этом следует стремиться к одинаковому быстродействию контуров скорости, чтобы при управляющих воздействиях не возникало уравнительных моментов между валами секции, связанными общей «одеждой». Это предотвращает нежелательное изменение натяжений ветвей «одежды» и сводит к минимуму влияние упругой связи. 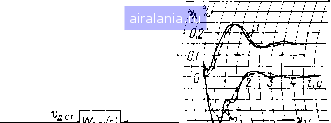 ад *---- H3i ЛТТи" 1 -Цр.еП-1 \imPJ-\Tc.p\1 I 1 [L г- hem "------ --- 1 i T" Рис. 2.21. Нормированная структурная схема и переходные характеристики СЭП с индивидуальными преобразователями Коррекция многосвязной СЭП (МСЭП) может быть произведена как без применения, так и с применением специальных корректирующих устройств, предназначенных для подавления упругих колебаний. В первом случае необходимое качество динамики МСЭП достигается путем перестройки параметров регуляторов скорости и соответствующего выбора значений малых постоянных времени локальных систем Тц = 7д,ci+ nTt. При этом основным контуром скорости, определяющим быстродействие МСЭП, считается контур с меньшей механической инерционностью Tmi. При 17211>о)у. 3 условие несущественности влияния упругости на рассматриваемый контур, выраженное через его частоту среза сОси, может быть записано в виде (2.122) С учетом этого параметры ПИ-регулятора скорости данного контура определяются формулами: 1 2 Предложенная настройка является оправданной при V2a7i>i. Настройка второго контура скорости выполняется так, чтобы его частота среза тг была равной Шси. Параметры PC этого контура скорости выбираются по условиям: р12=т2Тм22з?21«у.з; = Тц. (2.124) При 1/Т211<соу. 3 условие несущественности влияния упругой связи примет вид При выборе величины 3S1< зИ- (l/23si«y.3 (2.125) (2.126) что способствует формированию необходимых частотных характеристик объекта, параметры PC первого контура скорости выбираются по формулам: Рп = 0,5пТм21 V2ltuy. 3; V2I3 (2.127) При этом рассматриваемый контур скорости имеет настройку, близкую к СО. Быстродействие СЭП увеличивается по сравнению со случаем l/T2ii>(0y. з в (д/21)~раз. При условии (Oci2 = - (Ocu параметры PC второго контура скорости определяются выражениями: Р12 = 0,5йт2Т22л/2и21«у.з; Ti2 = Tn. (2.128) Реально достижимые частоты среза контуров скорости секционных приводов составляют в среднем 1-2 с"" При недостаточном быстродействии МСЭП следует применить /С-коррекцию по скорости с передаточной функцией (2.114) и параметрами: P,= lOV2fe.iT2i92itOy.3; т«-(10сОу.з)~, (2.129) что способствует оптималыюму подавлению упругих колебаний п системе. При настройке первого контура скороси на СО постоянная времени датчика скорости будет Тд. ci= (Vsy. з) > а параметры PC: (2.130) 113 Ри = 0,5пТм21 Vsi«y.3; = у- 3 что обеспечивает частоту среза оптимизированной системы = 0,5 Vsiy. 3-Для секций БМ соси составит 3-5 с. При Шс12 = tOcii параметры PC второго контура скорости выбираются по формулам: Pl2-0,5T2T„v2 VSltOy.al Ti2 = Tn. (2.131) в случае необходимости дополнительно может быть введена iC-коррекция по скорости Vj, что не вызывает затруднений в системе с индивидуальными преобразователями. Динамика СЭП с упругимисвязями первого и второго рода. Рассмотрим ЭП с индивидуальными преобразователями в общем случае влияния упругих связей первого и второго рода. Передаточная функция объекта регулирования каждого контура скорости, полученная по НСС (рис. 2.21), в данном случае будет O..i{p)-W,2i{p)W;,.,c{p)X Bi (Р) (P) ( 2k:;k 2kvk(f) (2.132) где Ai (p), Bi (p) - полиномы, определяющие влияние упругих связей первого рода. Как и в системе с общим преобразователем, степень влияния упругих связей на динамику МСЭП определяется соотношением электромеханических параметров объекта регулирования и выбранным быстродействием системы. На основании анализа выражения (2.132) в табл. 2.3 приведены условия доминирующего или взаимного влияния, а также несущественности влияния упругостей первого и второго рода. Таблица 2.3
Коррекция МСЭП сводится к достижению заданного качества динамики системы при оптимальном подавлении упругих колебаний. Основным (базовым) контуром скорости, определяющим быстродействие МСЭП, и в рассматриваемом случае считается контур с меньшей механической инерционностью Tmzi- Для формирования рациональных характеристик объекта регулирования целесообразно постоянную времени Тц этого контура выбрать по формуле 7211 = (л/й)у.з)"\ (2.133) а параметры PC - по условиям (2.130). Прн этом контур скорости имеет настройку на СО при частоте среза co,ii = 0,5 д/».з. При ()с12 = сОсп параметры PC второго контура скорости выбираются по формулам (2.131), а значение Т212 = (Vsaty. з)~ Если при этом наблюдается существенное влияние упругости первого рода, то на выходы PC можно включить активные режек-торные фильтры, настроенные на частоты coyj, или ввести i?C-Kop-рекцию по скоростям двигателей. При этом параметры /?С-коррек-ции определяются формулами: Ki = 2 -y/TkTziQiiQir, Ti = {2a)yf)-S (2.134) что обеспечивает оптимальное подавление упругих колебаний скоростей двигателей. Для более плавного протекания переходных процессов в системе при управляющих воздействиях на ее вход целесообразно включить апериодический фильтр с постоянной времени Тф = 4/(д/1йу, з)-Следует заметить, что при qi 0,5 или при Шу. 3 Шу оптимизация динамики МСЭП аналогична таковой для систем с упругими связями первого рода. При этом частоты среза контуров скорости, настроенных на СО, будут tOdt ~ 0,5 V<7i"yi- Для поддержания соотношения заданных нагрузок двигателей секции могут быть применены дополнительные связи (на рис. 2.21 показаны штрихпунктирными линиями). Связи с коэффициентами передачи осуществляют отрицательное компаундирование по току якоря своего двигателя. Перекрестные связи кси от базового (первого) контура ко всем остальным контурам скорости являются положительными. Исследования показали, что оптимальное значение лежит в пределах 0,005-0,01. Увеличение приводит к более эффективному поддержанию нагрузок двигателей, однако увеличивает интегральную ошибку системы при возмущениях (A.Qi. Коэффициенты ki определяются по условию • (2.135) д. я 1С 1ле /д.н1с. тике. n.nic - напряжения датчиков тока двигателейв ста- это условие означает, что положительная и отрицательная обратные связи на входе i-ro pc при заданных нагрузках двигателей компенсируют друг друга. предложенные рекомендации по оптимизации динамики сэп с индивидуальными преобразователями и упругими связями первого и второго рода были апробированы при моделировании на авм двухдвигательного привода. схема набора на авм компоновалась по нес, показанной на рис. 2.21. параметры объекта соответствовали сэп прессовой секции в общей «одежде» быстроходной бм шириной 7 м. на верхней рабочей скорости, равной 1000 м/мин, параметры объекта составляли tz = 40 с, i = 0.2, = 200, = 0,6, Гб = 0,3 с, = 0,08, = 0,01, toyi = 50 с-\ = = 100 с-\ I, = 3 = 0,05, соу.з = и с-1, L = 0,15. исследование динамики сэп проводилось на верхней и нижней рабочей скорости бм при диапазоне регулирования 1 : 2,5. настройки регуляторов соответствовали расчетным, для подавления упругих колебаний первого рода применялась /?с-коррекция по скоростям двигателей, для автоматического распределения нагрузок двигателей были введены дополнительные связи с коэффициентами передачи eia и кз- на рис. 2.21 показаны осциллограммы переходных процессов по скоростям двигателей при ступенчатом управляющем щ,с = = 0,15% (кривые /) и возмущающем lIcoi = 02 = 10% (кривые 2) воздействиях на нижней рабочей скорости. общий вид переходных процессов соответствует настройке на со при одинаковом быстродействии локальных контуров скорости, что сводит к минимуму влияние упругой связи второго рода при управлении. вместе с тем при возмущении заметно влияние упругости второго рода на локальную систему с меньшей механической инерционностью. упругие колебания первого рода подавлены за счет действия ic-коррекции. сравнивая динамику сэп с общим и индивидуальными вентильными преобразователями, следует отметить, что система с индивидуальными преобразователями имеет большие возможности для подавления упругих колебаний как первого, так и второго рода. ее применение оказывается предпочтительным для мощных сэп, в особенности в случаях значительного влияния упругих связей на динамику системы. Оптимизация однодвигательной СЭП. некоторые валы секций в общей «одежде» бумаго- и картоноделательных машин, в частности сеточных секций, могут быть неприводными, что налагает свой отпечаток на способы оптимизации таких сэп. в соответствии с вышеизложенной методикой исследования динамики рассмотрим двухвальный эп, в котором один из рабочих валов является приводным. нсс такого привода в общем случае влияния упругих связей первого и второго рода может быть получена на основании нсс на рис. 2.21 при условии \Ху = 0. при этом передаточная функция разомкнутого контура скорости примет вид Р1(Р)==Р.С(Р)Э2(Р)Д.С(Р)Х (2.136) где т qZ\TmT& 2 qziTui 2ЙуАф 2kuk(p ~ 7ms1 Н~ Тм2- динамит сэп с упругой связью второго рода. при пренебрежении влиянием упругости первого рода в выражении (2.136), л J (р) = (р) = 1. задачей коррекции сэп и в рассматриваемом случае является достижение требуемого качества динамики системы при условии подавления упругих колебаний каждого рабочего вала секции. коррекция системы может быть произведена как путем перестройки pc, так и с введением рассмотренных выше специальных корректирующих звеньев. при 1/Т21>соу. 3 условие несущественности влияния упругости второго рода на динамику сэп определяется выражением (2.122), а параметры pc, обеспечивающие выполнение этого условия, могут быть выбраны по формулам (2.123) с учетом замены Tsi на при 1/Г21<(0у.з условие несущественности влияния упругой связи примет вид (2.125), а рациональное значение ti и параметры pc соответственно будут определяться формулами (2.126) и (2.127). при недостаточном быстродействии сэп целесообразно применение ic-коррекции по скорости двигателя,, параметры которой определяются условиями (2.129) с учетом замены ti на Tms- при этом параметры pc выбираются по формулам (2.130), что обеспечивает настройку контура скорости на со при частоте среза coci - = 0,5VtOy.3. динамика сэп с упругими связями первого и второго рода. в рассматриваемом случае степень влияния упругих связей, а также условия несущественности такого влияния могут быть оценены на основании табл. 2.3. коррекция сэп аналогична коррекции систем с индивидуальными преобразователями. параметры pc выбираются по формулам (2,130). для подавления упругих колебаний первого рода может быть введена ic-коррекция по скорости двигателя, параметры которой определяются условиями (2.134). ГЛАВА ТРЕТЬЯ АВТОКОЛЕБАТЕЛЬНЫЕ РЕЖИМЫ РАБОТЫ СИСТЕМ ЭЛЕКТРОПРИВОДА 3.1, АВТОКОЛЕБАНИЯ В СИСТЕМАХ ЭЛЕКТРОПРИВОДА С УПРУГИМИ СВЯЗЯМИ ПЕРВОГО РОДА экспериментальные исследования промышленных эп, и в частности вентильных приводов бм, оснащенных унифицированной cp скорости с подчиненным контуром тока якоря двигателя, по- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 [18] 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 0.0289 |