
|
|
|
Главная -> Математическое описание сэп 0 1 [2] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 Урав1[ение (1.7) станет 1Де k, -..кф в. с (1.11) Д. с Уравнение (1.10) с уче™м (..И) «ожет быть переписано,- После подстановки уравнения (1.12) в (1.8):получим (1.12) - в. / , (1.13) где / в. т = в f -постоянная времени контура вихревых Ак В. С токов. Подставляя уравнение (1.13) в (1.9), имеем W в. тР -г U где --постоянная времени основного потоко- в в, с сцепления. После приведения к общему знаменателю уравнение (1.14) может быть записано как в (Тв. тР + 1) = ьв [Г.Тз. + (Гв о + 7. + Гв. т) р + 11 -kpT. оР1я. (1.15) Распределение корней уравнения Тв.трз + (Тв. о + + + Тв. т) р + 1 обычно таково, что можно пренебречь слагаемым TsTq.jP. с учетом этого выражение (1.15) примет вид 1)в (Та. тР + 1) - 1в [{Т + п. т) Р + 11 -рГв. оР1я, (1.16) где = Гв.о + Г. Постоянная времени Tg обычно учитывается коэффициентом рассеяния = 1,15ч-1,25. Тогда 7в = сг.Гв.о-аз ff"" • (1.17) АВ В. С Иногда кривая намагничивания машины задается в виде Фд = = /(/вШв. п). причем Ша.п -число ВИТКОВ обмотки возбуждения на полюс; = 2р1ю,\ р„ - число пар полюсов. В этом случае с 2d tti Ф Г.=а,-А гЛ, (1.18) АВ В. С где Св = в/Шв.п - коэффициент пропорциональности между по-16 током и МДС, определяемый тангенсом наклона касательной к кривой намагничивания Фд = f (/вв. п)- Уравнение (1.16) окончательно может быть записано в виде 1.=--ZVrP±i Z, (1.19) где Гв.э = Т, в. т 73. эР + 1 эквивалентная постоянная времени воз- буждения машины. Определим теперь связь между ц и фд в динамике. Из формулы (1.10) с учетом (1.11) следует LkTb.tPV (120) После подстановки уравнения (1.20) в (1.8) имеем Гв. тР + 1 фд ~"" в - Гв.тР -Ы (1в -Vh). (1.21) Следует отметить, что нормированные постоянные времени Ts, ?», т. Гв.о, Гв и Гв. э в уравнениях, записанных для относитель, ных единиц, равны таковым в уравнениях, записанных в абсолютных единицах, что предопределяет физическую наглядность и удобство экспериментального определения параметров электрической мшнины. Уравнения механической части электропривода. Кинематические ixtMbi механической части ЭП промышленных агрегатов могут быть весьма сложными, состоящими из нескольких инерционных масс, спизпиных валами, муфтами и редукторами. При этом возможно последовательное, параллельное и смешанное соединение кинематических звеньев механических передач. Для математического <ин1саиия многомассовых систем обычно используют расчетные схемы, в которые входит несколько сосредоточенных инерционных мпсс Jl и соединяющих их безынерционных упругих механических t ии1(»й, имеющих некоторые приведенные значения коэффициентов мисткости Ci, внутреннего демпфирования Ьс и зазора 2f, В ряде i.iVM.ien в расчетных схемах учитывают и внешнее демпфирование ПИ, обусловленное наличием сухого трения, ветрового сопротив-tnmii и другими факторами. I.к смотрим вначале последовательное соединение звеньев ме-*.1»ч кой передачи (рис. 1.4). При составлении дифференциальных \i(iimeHHi"i движения многомассовой механическо системы исполь-iVM и принцип Даламбера и предполагается, что силы и моменты, нуи)1цие на систему, приложены в местах сосредоточенных МММ, п упругие деформации подч11§нь1 закону Гука. При работе Му,= механизма в установившемся режиме с моментом сопротивления зазор выбран и вал находится в скрученном состоянии, соответствующем приложенному моменту М. При зтом следует различать угол рассогласования координат кон доведанного упругого звена бр и угол упругого скручивания звена дус] образуемый после выбора зазора Zi. С учетом изложенного исходные дифференциальные уравнения равновесия расчетной п-массовой системы имеют вид Mg-Лу1 = УдроЗд; (1.22) -- Ч-ЬхКсОд-(Oi) при р 10ci4-i<-ер1<есь (123) -М при Эс1<-GpiOci + Si; Myi-Aly2 = /]pcui; (1.24) Му;(„ ]) -Мс=«/мРС0м, (1.25) где - угол упругого скручивания данного звена передачи при моменте сопротивления механизма М- При переходе к относительным значениям переменных уравнения (1.22) - (1.25) могут быть записаны в виде 1д~[Ху1--Г„ друд; (1.26) Иу1 = при 1=-грра<1+2ai; \iyl-\iy2 = Tipvi, (1.27) (1.28) (1.29) где Т, д = УдСОд. JMcy Ti = У.-сод. JM, = У,(Од. JM - механические постоянные времени двигателя, промежуточных инерционных звеньев и механизма; Tt = MJ{Ci(aJ,c)\ Т,ц = bi/ci - соответственно постоянные времени, характеризующие жесткость и демпфирование упругих элементов механической передачи; Уд = = озд/шд.с; Vj = о) <Од.с; = со„/сОд..; р,д = MjIM; \iy[ = Уравнения связи. К уравнениям связи относятся в общем случае нелинейные уравнения ЭДС и момента двигателя: ЯдйФдОд; Л1д = Фд/„. (1.30) При переходе к относительным величинам эти уравнения примут вид (1.31) при малых отклонениях переменных возможна линеаризация урнипений (1.31) в виде Аед = Дфд + Агд; Ар.д = Дфд +А1я. (1,32) Нормированные структурные схемы блока двигатель - меха-На основании уравнений (1.3), (1.19), (1.21), (1.26) - (1.29) и (1.31) может быть построена нелинейная нормированная структур пая схема (НСС) блока двигатель-механизм, показанная на \fbyi )>----0-i*0*-- Рис. 1.5. Нормированные структурные схемы блока двигатель-механизм pin-. 1.5, а. Данная НСС является обобщенной, поскольку она со-Шржит достаточно полную информацию о характеристиках якорной цепи и цепи возбуждения двигателя, о свойствах многомассовой мг\,1пнческой системы с нелинейными упругими связями первого р>д; и пригодна для анализа динамики как «в малом», так и «в большим». Анализ приведенной НСС позволяет сделать вывод, что /г-массо-luni механическая система имеет п частот свободных упругих коле-гтипй соуь обусловливающих появление п соответствующих резо-и.ии-мых всплесков в частотных характеристиках объекта управлении, Сгепень влияния этих всплесков на динамику замкнутой си-« MMi.i может быть определена в каждом конкретном случае с помощью построения частотных характеристик АСУ. Как правило, \ичу подлежат те резонансные частоты щс, которые деформируют **р;К11))1стики АСУ в зоне существенных частот. При инженерных расчетах электромеханических систем часто ки шик.цг задача эквивалентирования многомассовой системы двух-м п! ipfXMMccoBofi. Для большинства практических случаев реаль-II П1 . Ill (IM.i двигатель-механизм в первом приближении может ги,1м. лиит,1лентирована трехмассовой системой, состоящей из дви-1М1.,и1. рсдуктора и механизма. Для определения в общем виде s< iKHiifi, которых трехмассовая система может быть сведена К двухмассовой, рассмотрим напряженную моментом Цс трехмас-совую механическую систему, когда влиянием зазоров механической передачи можно пренебречь. Передаточная функция между моментом Цд и скоростью двигателя может быть найдена с помощью правила Мэзона (см. § 1.3) по структурной схеме рис. 1.5, а: vn Wp{\ + Wu + Wu:-}-Wiv-uWiw) l-\rWi-\-Wu+Win -f- WiWni + WiWiy + WnWiv (1.33) где Wup - передаточная функция прямого пути между р-д и Wl-WlJ - передаточные функции I-IV контуров схемы. После несложных преобразований выражение для (р) примет вид tti (Р) [Т,г {Т + Т,) (! Р + Т,,р + 1) + + {Т,1Р-г\){ТТ,,р + Т,,р + \)]х X Г,,2Р где Тм2 = Тм.д + 71 + Гм. Полюсы Tl, Тз и нули То1, Тог функции (р), т. е. частоты резонансных пиков coyi = 1/Ti, (Oyg = l/Tg и провалов coqi = = 1/Toi, CU02 = l/Toa амплитудной характеристики IFj ((o), могут быть найдены при предположении малого демпфирования упругих колебаний в механической системе (при Tiz 0), что справедливо для многих промышленных ЭП. С учетом этого где л - ТТгТаТа; ВТ, (Т + Т) + Т,Т,и (1.35) rp2 D Возможности эквивалентирования трехмассовой системы двухмассовой зависят, с одной стороны, от соотношения параметров механической системы, а с другой - от настройки АСУ. При настройке АСУ без применения специфических видов последовательной или параллельной коррекции (активные полосно-заграждаю-щие, или режекторные, фильтры, /?С-коррекция) [59], когда нижняя частота упругих колебаний coyi в значительной степени подав- пшт Ml счет ипер1шонности АСУ, как правило, можно ограничиться picCMOTiieiiMCM двухмассовой системы. При применении специфических видов коррекции, подавляющих Шу, н [юзволнющих существенно повысить быстродействие АСУ, йлиинно второй резонансной частоты соуа может стать значительным, НТО потребует рассмотрения трехмассовой системы. Для исключе-ини этого оптимизация динамики АСУ должна быть выполнена учетом подавления частоты соуз. Определим, каково должно быть при этом соотношение частот (Иу и Wyj. На рис. 1.6 представлена нормированная логарифмическая амплитудная характеристика Wi разомкнутой АСУ, настроенной на оптимум по модулю (ОМ) или симметричный оптимум (СО), что определяется параметрами ЭП и режимами работы агрегата. По-строение ЛАХ выполнено при условии С0у1>1/Т21 (Tsi- суммарная малая постоянная времени системы), что справедливо в большинстве случаев. Ин рисунке введены обозначения Гшуг/соу! = а;(0о2/шу1 = I, utiii/(Oyi =7. Из построения характеристики следует, что 2()lg2?w- 20 Ig или 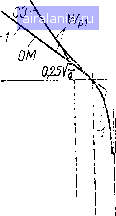 1>!  (1.36) Рис. 1.6. Нормированная ЛАХ зомкнутой системы где Л о - запас по амплитуде на частоте соуа (Ло чаще всего равно 2);, la--коэффициент демпфирования резонансного пика (з<0,1). При Тм. д, Tl < Т„ и Ci > с, что нередко справедливо для электроприводов непрерывно-поточных агрегатов, значение 3 определяется по формуле Следовательно, искомым условием эквивалентирования трех-мнссовой системы двухмассовой будет (1.37) а> Переписывая (1.37) в виде > (1.38) 0 1 [2] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 0.0099 | |||||||||||||||||