
|
|
|
Главная -> Математическое описание сэп 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [23] 24 25 26 27 28 29 30 31 32 33 34 Если принять Wio(p) Ту,. Wip) to равенство (4.20> будет справедливо при условиях: Ws{p)=W,{py, We (р) - W« (р) = -. м. доР Учитывая полученные условия, передаточную функцию устройства косвенного измерения момента можно привести при Тм.д = Тм.до к следующему виду: iclp) -„(р)Гд(р)иЛР) fc(p) И-до(р) wp) Принимаем Wn (р) = W, (р) = их; W, (р) = (4.21) тогда искомая передаточная функция определится так: Wy.AP)-AP)= г !4 1 где = Тм.до /1 - постоянная времени устройства. С учетом условий (4.21) передаточные функции звеньев устройства косвенного измерения момента сопротивления будут иметь вид Wio (Р) м. до где Гмо, Тм.до - номинальные значения механических постоянных времени механизма и двигателя. Рассмотренные принципы построения устройства косвенного измерения момента статического сопротивления нетрудно обобщить также и для многомассовых упругих механических систем. Косвенное измерение момента статического сопротивления в двухмассовой механической системе с помощью наблюдающего устройства. Для некоторых механизмов непосредственное измерение скорости второй массы затруднительно, поэтому реализация устройства косвенного измерения возмущения становится практически невозможной. В этом случае для оценки возмущения р-с целесообразно использовать астатическое наблюдающее устройство. Объект управления описывается системой дифференциальных уравнений: •1 =-- 1 "Ь ~ 2 -j- ----Хз-- p-cj Xz = ТиТс Xi -\---Xs, Тм д7с (4.22) где a:i = Vm, лгз = fiy, = v- переменные состояния. Запишем систему уравнений (4.22) в матричном виде: X = Ах И- Ви Н- Fz; у = Сх, (4.23)
an = ai3 = TuT, ; ai2 = fi= «31 = «33 Tu. pTc «32 = 3 = Tm., Оценим наблюдаемость объекта управления. Для этого составим матрицу наблюдаемости в соответствии с выражением (4.7):
где Qis = «11«з1-«21«32-«31«зз; аз «i2«3i ~1 «зазя. - - - «]з«з1 -г «23«за «а:*- Определим матрицы наблюдаемости: (кЧОн- - «.nf/83-«azf/ia («32-«!ii)«:.Ku2- «:i п/.и) Пет)удн{ шж.кпть, что если 7, (обычис» jki vi.ii<MMir m,i полняется), то del Q„ Ф О и г;т1ч Q„ 3, т. е. огп.)! \пр.ним пни полностью наблюдаем, (инте.ч астатического маПлюдакши!п yi i ройсчиа iipoiruiojunch n cootiinviium с ypaiuiciiiicm (4 11) X Лк i Wn I К (I/ ci) IK ,n ( C.x). , (! .i) I 11 Так как матрицы А, В и С определены, то в результате синтеза необходимо найти значения элементов матриц К и K-i. Для этого, вычитая из уравнения (4.24) уравнение (4.23), получим формулу для ошибки оценки зГ--х -х: • х=---(А-KC)x+K iFJ (г/-Cx)d/ -Fz. Считая, что Z const, и дифференцируя последнее выражение, можно записать X = (А -КС)х-K iFCx. Искомые коэффициенты можно определить из характеристического полинома det [рЧ-р (А-КС) -f K-iFC], принимая для него одно из известных распределений корней [31], посредством приравнивания коэффициентов при одинаковых степенях р. Опуская промежуточные преобразования, можно записать формулы для коэффициентов так: (4.25) с с где di - коэффициент стандартного полинома при j-й степени оператора р\ соо - базовая частота, выбор которой осуществляется исходя из желаемой быстроты затухания ошибок оценки. Структурная схема астатического наблюдающего устройства для двухмассовой системы с упругой связью, обведенная штриховыми линиями, показана на рис. 4.4, а. Косвенное измерение изменения напряжения сети переменного тока, питающей тиристорной преобразователь. В некоторых случаях значительное влияние на качество функционирования автоматизированного электропривода непрерывно-поточных агрегатов может оказывать изменение питающего переменного напряжения тиристорного преобразователя, использующего для формирования угла открывания тиристоров стабилизированные опорные напря- жения [66]. Структурная схема тиристорного электропривода с устройством косвенного измерения изменения напряжения сети переменного тока, построенным в соответствии с изложенными выше принципами косвенного измерения возмущений, изображена на рис. 4.4, б, где Гр.т (р) - передаточная функция регулятора тока; Гп-= - зователя. передаточная функция тиристорного преобра- а?, Ум. Надлюдатель -К) Ь Wp.r(p) Тт.пР*1 4.Л1 . 1,я Ц(р} Тяр*1 Щ(р) Рис. 4.4. Структурные схемы астатического наблюдающего устройства и устройства косвенного измерения изменения напряжения сети, питающей тиристорный преобразователь Тиристорный преобразователь рассматривается как непрерывное устройство, что является вполне допустимым для электроприводов непрерывно-поточных агрегатов, имеющих быстродействие намного меньше предельного. В соответствии со структурной схемой (рис. 4.4, б) можно составить следующее выражение для выходного сигнала устройства: [Щ (р) + W, (р) Гд(р)] Ус (Р) + Д (р) J Wn (P) (P) Д(р) + -13 {p)~keW, {p)W2 (P)]>c, (4.26) где (p), Wp ip) определяются в соответствии с выражениями (4.13); Mp) = \ + KWAp)Ap)- Для независимости выходного сигнала устройства от изменения момента статического сопротивления необходимо, чтобы а!(р)=-.я(р)«2(р). (4.27) в этом случае получаем 2(р)+из(р)д(р)=2(р)А(р). С учетом последнего выражения формула (4.26) может быть записана так: = -«я (Р) "2(Р)Uc[Wx{p)-Wn (Р) WMW2 (р)] ip.T. (4.28) Для независимости выходного сигнала устройства от изменения переменной Up. в соответствии с (4.28) необходимо, чтобы Wi(p) = ir,(p)WJ(p)W2(p). (4.29) Для определенности положим передаточную функцию (р) равной г{р)-\1{КК1 (4.30) тогда согласно выражениям (4.27) и (4.29) получим Wxip) (4.31) ГяР-rl где 1=1; = Vn. Передаточная функция устройства косвенного измерения изменения напряжения питающей сети будет иметь вид W (p)- .-MpL = Uc (Р) (4.32) где = 1/п. В данном устройстве звено с передаточной функцией W3 (р) предназначено для компенсации действия обратной связи по про-тиво-ЭДС двигателя. 4.4. РЕАЛИЗАЦИЯ УСЛОВИЙ ИНВАРИАНТНОСТИ ПО МОМЕНТУ СТАТИЧЕСКОГО СОПРОТИВЛЕНИЯ В ОДНОМАССОВОЙ СИСТЕМЕ ЭЛЕКТРОПРИВОДА Комбинированная система регулирования. Структурная схема обобщенной инвариантной двухконтурной автоматической системы регулирования электропривода приведена на рис. 4.5, а. Струк- турная схема комбинированной системы регулирования получается из схемы на рис. 4.5, а путем исключения дополнительных связей, относящихся к СЭП с косвенным измерением возмущения, т. е. при \Гк.т2(р) = ttK.c2(p) =0. Информация о моменте сопротивления получается с помощью магнитоупругого датчика момента, передаточная функция которого 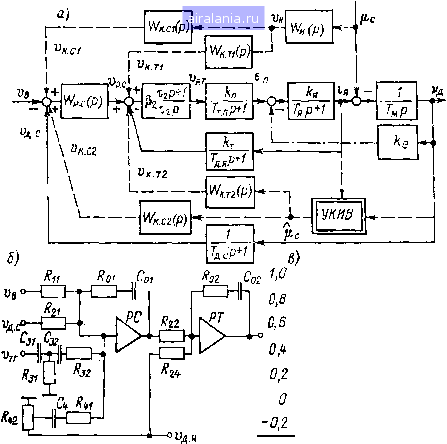
исходная АСР --индариантная АСР с Ц-КУ ......инвариантная fiCPсПД-К]/ Im. 4.5. Нормированная структурная схема СЭП с косвенным измерением момента сопротивления и переходные характеристики »» ределяется выражением н(р)=: Т,Р + 1 (4.33) I Ьтариантпая связь по моменту может быть введена на вход jiiiyjiviropa скорости или регулятора тока через компенсирующие yi г!1(»йсп>;1 (КУ) соответственно с передаточными функциями (р) ii U.n (Р). Настройка регуляторов тока якоря и скорости выполняется и mill.....iciimii с 1ги»с11ым11 условиями оптимизации контуров ♦ и» пм iiiiii4iiiicimiii о pciy,;iiip(maiimi. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [23] 24 25 26 27 28 29 30 31 32 33 34 0.0025 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||