
|
|
|
Главная -> Математическое описание сэп 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [28] 29 30 31 32 33 34 будут найдены из условий инвариантности. Для этого рассмотрим матричное уравнение системы Аз (р) Xi = Gi(p) Z, (4.83) Аз(р) =
Z= [UyUcfXcf; «1в(р)-Гр.Лр)Го.д(р); «21(р) = Гр я(р); «24(Р)--Гр.я(р) WMWnip); «25 (Р) Гр. я (р) [Гг (р) (Р) - Го. я (Р)1; «26 (Р) Гр. я (Р) Г2 (Р) Г22 (Р); «32 (Р) = Wp, 3 (р); «зз(Р) = 1-р.в(р)1(р) Wii(p); «34 (Р) = Гр.в (р) 1Го.в (Р) + Гх (р) Г12 (р)]; «43 (р) = Гп (р) Гз (р); «54 (р)=КЩ (р) (р); «64 (Р) = Гм (р) Гф (р); «65 (Р) = (Р); (Р) Гр., (р); g42 (Р) = Гз (р); 63 (Р) = Гм (р). Дополнительное движение выходной координаты системы д, вызванное действием возмущений и рс. определяется выражением д = Фи(Р)»с + Фц(Р)с. Ф (р) Д = g42 (Р) (Р) Ue(P) det A3 (р) g42 (Р) {33 (Р) [Дб4 (Р) - Q54 (Р) 65 (Р)]} det A3(р) передаточная функция системы по возмущению Уд(Р) Ябз(Р)Лбб(р) .uc(p) det A3 (р) g63 (Р) {33 (Р) + 34 (Р) Q43 (Р) - Q32 (Р) 043 (Р) [24 (Р) " О54 (Р) 25 (Р)]} det Аз(Р) - передаточная функция системы по возмущению [х,- Условие полиинвариантности СЭП к действующим возмущениям Vд = О можно реализовать при Л46 (р) - Лее (р) = О, что достигается соответствующим выбором передаточных функций компенсирующих устройств Wl (р) и Га (р). Адъюнкта определителя Л46 (р) = О, если азз(р) = 0 или 1~Гр.ар)Г1(р)Г11(р)=-0. (4.84) Для выполнения условия Лее (р) = О необходимо, как следует из передаточной функции Фд (р), чтобы «33 (р) = 0; «34 (Р)-«32 (Р) [«24 (Р) - «64 (Р) «25 (р)] = 0. (4.85) Из формулы (4.84) найдем вид передаточной функции (р), обеспечивающей вьпюлпеиие требования абсолютной инвариантности к действию возмущения со стороны сети переменного тока, питающей вентильный преобразователь: 1 Тзр Гх (р) = 11 (Р) «р.в(р) (4.86) Учитывая физическую реализуемость передаточной функции Wl (р), ее можно записать при кц = Тд/Рз = aTkkj. так: Wi(p)=--, (4.87) где Tl - постоянная времени, значение которой будет определено ниже. Из выражения (4,85) найдем с учетом условия (4.86) передаточную функцию Га (р): W.(n)== Цо-в (Р) + 1 (Р) 12 (Р) + keW (р) (Р) Wp. я (Р) Wo. я (р) Йеи5ф(р) Wh(p)U523(P)+ W2i(p) (4.88) 173 подставляя соотношения (4.82) и (4.87) в последнее выражение I 123 (р) о и tl = гд. я = тд, получаем a2 a,TzjTi3(J,p + Р) + а2Т22(Тв.т + Дз72з) + ТИзР + 1 (ПР + 1) (4.89) где аз, из - коэффициенты, зависящие соответственно от условия оптимизации контуров возбуждения и тока якоря; тз, - «малые» постоянные времени соответственно контуров возбуждения и тока якоря. принимая в передаточной функции Wo (р) коэффициент k21 = - /гявет.я. переходим к ее упрощенному виду: W2 (р) (4.90) TkiPH- 1 определим передаточную функцию компенсирующего устройства Wl ip) для второго варианта построения полиинвариантной системы [w23 (р) =7 0]. подставляя выражения (4.82) и (4.87) в (4.88) при tl = гд.я = тд.з = таз, получаем (р) агЧТъгТъЛТгР + Р") + 222 (Тв.т + аТъ) Р + а%Тф + 1 /г2з(И-/го)(ГзР + 1) гт.я (4.91) где 0 = I/I.-h); 72 = hTJ{\ + -feo)- учитьшая физическую реализуемость передаточной функции Wl (р) и простоту построения ку, при кз = т. я/(1 + о) можно записать Г2(р) = ТкаР + 1 (4.92) очевидно, в качестве упрощенного компенсирующего устройства в обоих случаях можно рассматривать также и пропорцио-иальное ку с передаточной функцией w;(p) = w;(p) = l. (4.93) оптимальные значения «больших» постоянных времени пд-ком- пенсирующих устройств и Тк, входящих соответственно в передаточные функции (4.90) и (4.92), определяются в процессе многокритериальной оптимизации. диаграмма качества, рассчитанная на цвм для первого варианта полиинвариантной системы, приведена на рис. 4.11, б. из рисунка следует, что оптимальным значением постоянной времени пд-компенсирующего устройства является то-0,8572. (4.94) следует отметить, что для второго варианта построении полн-инвариантной системы диаграмма качества достаточно близко совпадает с диаграммой качества на рис. 4.11, б. кроме того, в результате многокритериальной оптимизации «большой» постоянной времени пд-компенсирующего устройства получено ее значение, совпадающее с условием (4.94), переходные процессы, рассчитанные на цвм, показаны на рис, 4,12 при изменениях момента сопротивления р,, (рис. 4,12, а) и напряжения питающей сети (рис, 4.12, б). 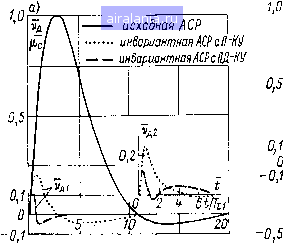
Рис. 4.12. Переходные характеристики из анализа характеристик переходных процессов при воздействии рс можно заключить, что рассмотрен]1ые выше два варианта построения полии1шариаит11ой системы от]10сительно данного возмущения являются практически эквивалентными [на рис. 4.12 функция Уд1 (/) соответствует первому варианту, а Уд2() -второму варианту построения полиинвариантной сэп], таким образом, синтезированная полиинвариантная система имеет высокие динамические характеристики при отработке возмущений рс и 4.9. СИНТЕЗ ИНВАРИАНТНЫХ СИСТЕМ УПРАВЛЕНИЯ ДВУХМАССОВЫМИ ЭЛЕКТРОПРИВОДАМИ С УПРУГИМИ СВЯЗЯМИ появление в контуре регулирования скорости двухмассовой сэп слабодемпфированного звена, обусловленного упругими свойствами механической передачи, определит особенности оптимизации такой системы. в зависимости от требований, предъявляемых к быстродействию сэп по управляющему воздействию, применяются специфические средства коррекции или используется обычный регулятор скорости со скорректированнными параметрами (при малом быстродействии системы). Учитывая, что влиянием упругости на динамику токового контура в большинстве случаев можно пренебречь [13], компенсацию изменения напряжения сети переменного тока, питающей тиристорный преобразователь, выполняют так же, как и в жестких СЭП. Таким образом, рассмотрим особенности синтеза СЭП с упругими связями, инвариантных до е к возмущению в виде изменения момента сопротивления нагрузки. Применение специфических средств коррекции, как правило, не позволяет увеличить частоту среза системы выше значения тО,Ьл/д (Оу, где соу - частота упругих колебаний механической системы, q = J.luz - коэффициент соотношения масс. Поэтому задача синтеза инвариантных СЭП, имеющих высокие динамические свойства при отработке указанного возмущения, приобретает особый интерес и актуальность. При синтезе СЭП будем считать, что для демпфирования упругих колебаний используются известные способы коррекции [59]. Следует заметить, что параллельная коррекция в виде гибкой связи по скорости двигателя, наиболее часто применяющаяся для демпфирования упругих колебаний ввиду простоты ее технической реализации, является частью устройства косвенного измерения возмущения в двухмассовой системе (см. рис. 4.2), и поэтому могут быть использованы изложенные в § 2.2 условия оптимизации СЭП с упругими связями. Сигнальный граф АСР электропривода с двухмассовой упругой механической передачей, содержащей устройство косвеннного измерения момента (см. рис. 4.2), приведен на рис. 4.13, а. Система описывается матричным уравнением А(р) =
(4.95) «21 (р)=«26 (р)=ф.. к (р) = «32 (Р)=«34 (Р) = Гд(р) = «4з(Р)=«45(р) = Гс(р)= -«34 (Р) = 52 (Р) = Г, (р) = IdP±± . 82 (Р) = Гк (р) W, (р); аез (р) Г, (р) (р); «65 (Р) = Г, (р) Гз (р); bn{p) = W,,M; Wi(p)-А; W2(p)-=-; Гз(р) = -; TkiP + 1 TkiP "Г 1 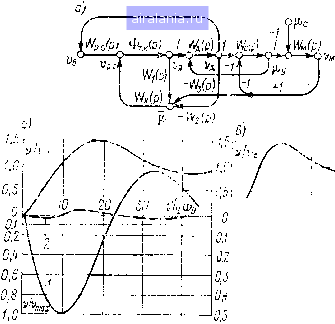
Рис. 4.13. Нормированный сигнальный граф СЭП [с упругой связью и переходные характеристики Tl (р); Гц (р) И Гз (р) - передаточные функции звеньев устройства косвенного измерения момента; Г (р) - передаточная функция компенсирующего устройства. В соответствии с вышесделанными допущениями будем считать, что исходная СЭП устойчива за счет корректировки параметров регулятора скорости или применения специфических средств коррекции. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [28] 29 30 31 32 33 34 0.0116 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||