
|
|
|
Главная -> Математическое описание сэп 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 [34] Учитывая, что обычно контур регулирования натяжения находится в конце БМ, как правило, между последней сушильной группой и каландром, которые имеют различные механические постоянные времени ti, представляет интерес оценить влияние этого фактора на переходные процессы по натяжению. Сравнивая переходные процессы в исходной и инвариантной АСРН на нижнем уровне скорости БМ при различных значениях механических постоянных времени секций (Ti = 177 с, Г„. - 90 с, Г,з=40 с) (рис. 5.10, а) с переходными процессами, полученными ранее, можно заметить, что отмеченный фактор незначительно влияет на их вид. 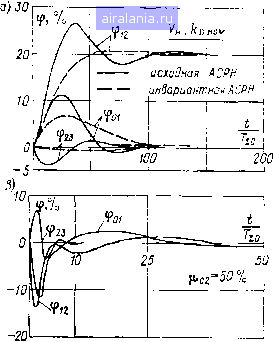
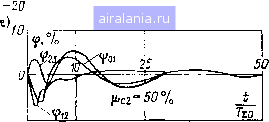 Рис. 5.10. Переходные процессы изменения натяжения материала непрерывно-поточного агрегата Оценим влияние изменения момента сопротивления нагрузки на характер переходных процессов по натяжению обрабатываемого материала. Переходные процессы при ступенчатом изменении возмущения на 50% на нижнем уровне скорости БМ приведены на рис. 5.10, б, в, г. Наиболее значительно изменяется натяжение в исходной АСРН (рис. 5.10, б). В инвариантной АСРН (рис. 5.10, в) наблюдается существенное повышение быстродействия, но динамическое отклонение натяжения практически такое же, как и для исходной АСРН. Эффективным путем стабилизации натяжения материала в условиях действующих возмущений является введение в СЭП канала компенсации возмущения. При этом достигается уменьшение динамического отклонения натяжения в среднем в два раза и сокращение времени переходного процесса приблизительно в два-три раза (рис. 5.10, г). Таким образом, для построения высококачественных АСРН целесообразно сочетать рассмотренный выше принцип проектирования малочувствительных систем, обеспечивающий высокую стабильность переходных процессов по управляющему воздействию при изменетп! условий работы НПА, с принципом косвенного измерения доминирующих внешних возмущений, позволяющим минимизировать динамические отклонения натяжения при отработке возмун1,ений. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 [34] 0.0083 | |||||||||||||||||||||