
|
|
|
Главная -> Механические вариаторы скорости 0 [1] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Они подразделяются на две подгруппы: статические и инерционные. К числу инерционных вариаторов скорости относятся те, работа которых основана на использовании сил инерции движущихся деталей, специально для этого предназначенных. В обоих подгруппах вариатор может обладать или не обладать идеальной характеристикой. Характеристика вариатора называется идеальной в том случае, когда в пределах заданного диапазона регулирования обеспечивается постоянство мощности и числа оборотов двигателя при различных значениях крутящего момента на выходном валу. Принятая классификация является упрощенной и не охватывает все возможные схемы и конструкции механических вариаторов скорости. Однако разнообразие существующих конструкций, применяемых и предлагаемых к применению, ею исчерпываются. В заключение следует отметить, что большинство конструкций вариаторов имеют серьезные недостатки, особенно это относится •к вариаторам для мощностей выше 15-20 тт. Поэтому изыскание простых конструкций механических вариаторов, которые были бы надежны в работе и позволяли передавать большие мощности, является проблемой сегодняшнего дня. Глава первая ТЕОРЕТИЧЕСКИЕ ИССЛЕДОВАНИЯ ВАРИАТОРОВ СКОРОСТИ С НЕПОСРЕДСТВЕННЫМ КАСАНИЕМ РАБОЧИХ ТЕЛ 1. ВАРИАТОРЫ, У КОТОРЫХ ОБРАЗУЮЩАЯ КАТКОВ ЯВЛЯЕТСЯ ПРЯМОЙ ЛИНИЕЙ Определение передаточного отношения вариатора скорости Рассмотрим передачу вращения коническими катками (рис. 2, а) при условии, что буксование отсутствует и вершины О и образующих конусов не совпадают, причем вершина ведущего конуса Oj расположена на образующей ведомого конуса, т. е. расстояние между вершинами конусов положительное a = 00i> 0. Изменение передаточного отношения ti , = - вариатора осу- ществляется перемещением ведущего катка / вдоль образующей 05 ведомого катка 2. Вследствие несовпадения вершин конусов только в одной из. точек касания (точке К) окружные скорости катков 1 а 2 будут равны. Во всех остальных точках касания происходит неизбежное скольжение и износ катков. Кроме того, тела вращения, соприкасающиеся в начальный момент по линии, после приложения внешних сил деформируются и соприкасаются по некоторой площадке шириной t (рис. 3). Давление р на площадке контакта, по теории Герца, изменяется по полуэллипсу, а элементарные силы трения, возникающие вследствие скольжения, прямо пропорциональны давлениям и не параллельны между собой. При вращении катков равнодействующая давлений смещается относительно плоскости XOZ и создает сопротивление перекатыванию. Задача определения действительных радиусов качения катков с учетом распределения давлений по полуэллипсу [27] приводит к необходимости пользоваться номограммой, построенной для этой цели, и решение ее не дает общей аналитической зависимости. Исследованиями [27] также установлено, что для часто встречающихся в практике соотношений размеров контактной площадки 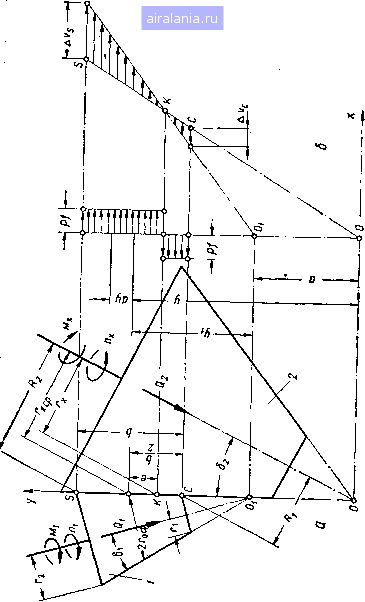 >> m "8 3" s § as с та s a. y, не превышающих 0,25, можно без больших погрешностей для инженерных расчетов решать задачу, считая, что все силы трения параллельны между собой и перпендикулярны к образующей катков. В соответствии с изложенным в решении поставленной задачи приняты следующие допущения: 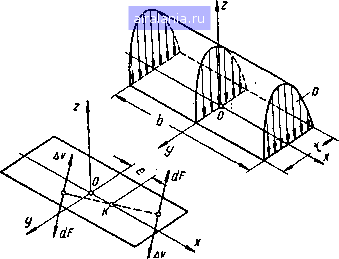 Рис. 3. Схема распределения давлений на площадке контакта. сопротивление перекатыванию (от упругих сил - не учитывается) незначительно; элементарные силы трения параллельны между собой и перпендикулярны к образующей по линии касания; сила нажатия, расположенная нормально к образующей катков, распределяется по длине b контактной линии равномерно, скорости обоих катков равны в точке К. Радиус г. (см. рис. 2, а) начальной окружности ведомого катка 2 определяют из условия его равновесия. На рис. 2, б показан график изменения скорости скольжения До = - v, а также график сил трения pf, отнесенных к линии касания катков. Следует отметить, что направление момента сил полезных сопротивлений противоположно направлению вращения ведомого катка 2, а силы трения pf противоположны направлению относительного скольжения. Так например, для ведомого катка 2 силы трения на участке SK направлены в сторону вращения, а на участке КС - в сторону, противоположную направлению вращения. Для ведущего катка / - наоборот: силы трения на участке SK направлены в сторону, противоположную направлению вращения, а на участке КС - в сторону вращения. При условии равномерного вращения уравнение моментов сил, приложенных к ведомому катку, имеет вид Д. Гх sins, sin ~M,-i- ] pfysm\dy- J pfysm\dy==0, (1.1) sin 6, sin 5, где P ~ ~b ~ rSnl--давление на единицу длины катка; f - коэффициент трения поверхностей катков (табл. 1); S, - угол образующей ведомого конуса; /?2, и R[ - соответственно наибольший, начальный и наименьший радиусы окружностей катка в пределах контактной линии. Таблица 1 Значения коэффициента / трения скольжения во фрикционных передачах Наименование материала и условия смазкн Сталь по стали со смазкой...... » » » или чугуну всухую . » . » текстолиту или фибре всухую » или чугун по коже всухую .... » по ферродо всухую......., » или чугун по резине всухую . . » » » » дереву » ... Сталь - бумага в питающих приспособлениях Резина - бумага.............. Латунь с рифленой поверхностью - бумага 0,04-0,05 0,15-0,20 0,20-0,25 0,20-0,35 0,30-0,35 0,35-0,45 0,35-0,5 0,20 0,40 0,40 Подставляя значение р в уравнение (1.1), после интегрирования и преобразований получаем = 2тда;1( + -2 (1-2) Из рис. 2, а видно, что = г, CP - 4 2. где /-jc ср - средний радиус катка. 12 Заменяя л ъ формуле (1.2) их значениями, имеем CP (у sin fcsin*52 Решая уравнение (1.3) относительно г, получаем (1.3) X ср Условие равновесия ведущего катка / при равномерном его вращении определяется из уравнения моментов sin 6, sin 5, - Ml- J piys\n\dy + J pfysinbdyQ. (1.5) sin 6, sin 6j После интегрирования, подстановки значений Р-ьШь/ 2 = -ocp + ySin8j; /-1-Vp--sin8, и ряда преобразований получаем i = FlOT,hcp+(sin8,f-,J. (1.6) где Ло, Tj, A-j, Гцср - соответственно начальный, наибольший, наименьший и средний радиусы ведущего катка; 5 - угол образующей конуса катка. Решая уравнение (1,6) относительно радиуса Гд, имеем Радиус Го при известном определяется также из равенства, составленного в соответствии с рис. 2, а, Гх „ Го , sin 82 откуда Передаточное отношение вариатора ffl £х rxSlnS2 (1.8) (1.9) "х <»л г а (гя - а sin S2) sin 81 где определяется по формуле (1.4), а г„ - по формуле (1.8). Анализируя формулу (1.4), можно видеть, что радиус начальной окружности ведомого катка равен среднему радиусу /,:cp при следующих условиях: (1.10) (1.11) (1.!?) 4 ~ Qr sino„ = 0; 6 = 0. 0 [1] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 0.0075 |