
|
|
|
Главная -> Механические вариаторы скорости 0 1 2 3 4 5 6 7 8 9 10 11 [12] 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 устройство, принцип действия которого заключается в следующем: между опорным кольцом 4 и ведомым диском 8 установлена шайба 5; на боковых поверхностях кольца 4 и шайбы 5 сделаны круговые канавки с трехкратным плавным изменением глубины, как это показано на рис. 46, б; в этих канавках располагаются три шарика 2, заключенные в сепаратор 6 (позиции на рис. 45, 46 и 47 одни и те же). На обойму с роликами / (см. рис. 45), которая может поворачиваться, действует момент, равный сумме моментов на ведущем и ведомом 3 валах; с изменением этого момента изменяется положение обоймы 9 и шайбы 5, которые связаны пальцем 7. Вследствие переменной глубины канавки шарики, перекатываясь в ней, увеличивают или уменьшают давление между дисками. Определим условие работы механизма самозатягивания, приняв условно, что движение от Диска 10 к диску 8 передается только одним роликом. Окружное усилие, передаваемое ведущим диском 10 ролику /, в соответствии с обозначениями по рис. 47 равно 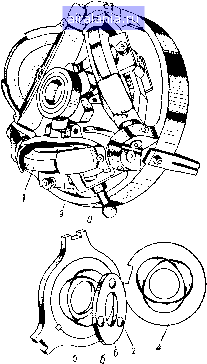 Рис. 46. Общий вид: а) обоймы с роликами; б) самозатягиваго-щего механизма. Л - р COS (а - Ч)) • (3.14) Такое же уравновешивающее усилие будет приложено к ролику в пятне контакта ролика / с ведомым диском 8. Следовательно, момент, приложенный к обойме 9, равен Мо = 2РН, (3.15) где Н - расстояние от оси вращения дисков до точки приложения равнодействующей 2Р: Н = А - р cos «(. cos !f. (3.16) Окружное усилие, передаваемое на шарик механизма самозатягивания, равно Рш = , (3.17) где т) - коэффициент, учитывающий потери на трение при повороте обоймы 9. 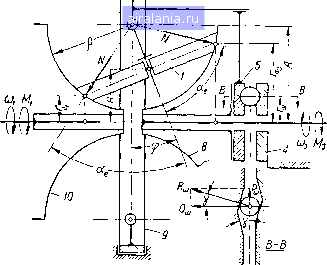 Рис. 47. Схема действия сил в самозатягивающем механизме. Осевая составляющая окружного усилия равна О - - Выражая Mq через Мкр,, получаем 2MkpiH-Р COS ctg COS ср) Т1 ""[A-pcosCae-cpjJrtgT Условие равновесия диска 8 Сш = iVsin (а, -Ьср). Условие работы вариатора без буксования т>р. (3.18) (3.19) (3.20) "кр1 sin («е -(- f) Л - р cos («е - (?) Подставляя в формулу (3.21) значение Qm из (3.19), получаем 2Мр1 (Л - pcosae cosy)/Ti [А - р cos (ag - о.)] tg 7 sin («е -Ь Ч) -Р COS (ае-ср) (3.21) 1учаем (3.22) откуда [Qf < S/lH -PCOSae COS о) sin (a, + <f) (3.23) Для конструкции, показанной на рис. 45, угол = 90°, следовательно, формула принимает вид tgT<7.. (3.24)  ш cos tf в частном случае при /==0,2, Л =142 мм, 7) = 0,5, Гц, = 30 мм и срмакс = 39°, получаем te V < 2 • Q-2 • 0.5 30 • 0,777 ~ = 1,218 и Y <50°30. Рис. 48. Схема определения при- п,,„ „ п г. веденного радиуса кривизны Ири? = О получим tg = 0,9466 рабочих поверхностей шарика Y < 43 30 . и беговой дорожки. В соответствии с результатами, полученными при решении примера, можно рекомендовать = 40-- 45°. Размер шариков принимается конструктивно и проверяется на прочность. 1.2 I Рис. 49. График \= f(Q). Максимальное напряжение сжатия на площадке контакта шарика с канавкой кольца самозатягивающего механизма определяется по известной формуле для случая контакта шарика с то-роидом при гз= со (рис. 48) макс - 4100 ш (2 (3.25) где Qm -усилие, действующее на все шарики; К - число шариков; коэффициент, учитывающий неравномерность распределения нагрузки между шариками (свц = 0,75); Хо - определяется из графика на рис. 49 по вспомогательному углу 6, который для данного случая может быть найден по формуле cos О = (3.26) Для шарикоподшипниковой стали допускаемое напряжение [а]сж не должно превышать 30 000 кг/см. 10. ТОРОВЫЙ ВАРИАТОР КОНСТРУКЦИИ ЦНИИТМАШ СИСТЕМЫ СВЕТОЗАРОВА Вариатор скорости конструкции ЦНИИТМАШ составлен из дисков, у которых образующей рабочих поверхностей является 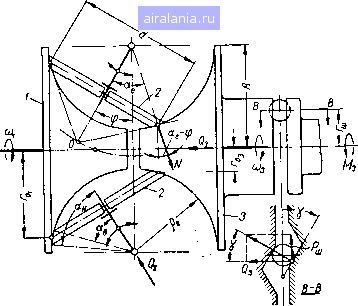 Рис. 50. Схема сил самозатягивающего механизма системы ЦНИИТМАШ. дуга окружности. Ведущий диск / (рис. 50) и ведомый -5 расположены соосно, средняя плоскость промежуточных роликов 2 смещена относительно оси их поворота. Регулирование скорости осуществляется изменением угла ср наклона роликов 2. Рассматриваемый вариатор выгодно отличается от других вариаторов такого же типа тем, что смещение промежуточных роликов от оси их поворота выбрано в соответствии с условием, обеспечивающим минимальное скольжение по линии контакта дисков во всех положениях роликов 2. Последнее достигается тем, что вершина О конуса, образующая которого, является касательной к рабочей поверхности ролика 2 в полюсе качения, во всех положениях ролика находится на незначительном расстоянии от оси вращения дисков 1 и 3. Рекомендуемые геометрические соотношения размеров вариатора, удовлетворяющие указанным условиям, приведены в табл. 5. Таблица 5 Рекомендуемые размеры (в мм) тел качения в вариаторах ЦНИИТМАШ А = 125 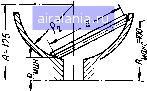
Диски прижимаются автоматически самозатягивающим механизмом так, что сила прижатия дисков зависит от величины крутящего момента на ведомом валу. Износ рабочих поверхностей компенсируется перемещением дисков 1 н 3 вдоль их оси вращения. Два промежуточных ролика 2 (рис. 51) монтируются в рамке 9, которая шарнирно связана с траверсой 10 и может перемещаться, скользя по направляющим /, создавая таким образом равномерное распределение давления между роликами 2. Механизм поворота роликов 2 приводится в движение маховичком 3 и состоит из шестерни 4, которая находится в зацеплении с рейкой 5, прикрепленной к ползуну 7, скользящему по прямолинейным направляющим. Движение от ползуна 7 к осям 8 передается посредством сухарей б. Диски на схеме рис. 51 не показаны. Диапазон регулирования скорости вариатора Д=6~8. Материалы для фрикционных пар рекомендуется принимать: Ст. 3 по текстолиту или закаленная сталь по такой же закаленной стали (ШХ15). Небольшое скольжение в зоне контакта дисков позволяет проектировать вариатор с сухими поверхностями тел качения. По данным ЦНИИТМАШ, к. п. д. вариатора колеблется в пределах 0,92 - 0,93 при стальных дисках / и 3 {см. рис. 50) и роликах 2 из текстолита, и 0,94 - 0,96 при роликах из стали. Торовые вариаторы системы Светозарова проектируются для мощностей до 20 кет при числе оборотов входного вала от 960 до 1460 об/мин. Конструкция вариатора показана на рис. 52, характеристики даны в табл. 6, основные габаритные размеры- в табл. 7. Приближенное, но достаточно точное значение межосевого расстояния А (см. рис. 50) можно определить по формуле (1.74). Сила нажатия определяется в соответствии с формулой (1.69) и равна 2М-, [{а„ - ад) + у (sin2=t„ - sin 2 а)] D Рг / COS 9о (cos -)- cos а) Z где Z - число роликов 2 п; D = {н - «в) - (sin ая - sin а.в) - tg сро (cos ав - cos а„). Зависимость между силой Qg и Qj- (рис. 50) определяется равенством 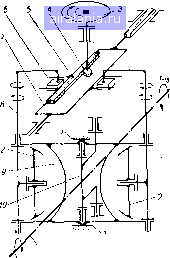 Ось вращения ведущего и ведомо-ы, го дисков, которые на схеме не показаны Рис. 51. Схема вариатора системы ЦНИИТМАШ. Оз = 0-2 sin (а, -у) 2 cos а„ (3.27) Максимальное линейное давление в зоне контакта, при условии, что прижатие фрикционных пар осуществляется перемещением дисков / и 5 и распределяется на два ролика, определяется в соответствии с формулой (1.40) при tp = <в„ахс и равно Qs sin (а; - cf) PlH= -1-i- . P2 [{н - «в) + 2" 2 (ag - <p) - - sin 2 (or - <f)J По формуле (1.86) определяется передаточное отношение вариатора. 0 1 2 3 4 5 6 7 8 9 10 11 [12] 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 0.0266 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||