
|
|
|
Главная -> Механические вариаторы скорости 0 1 2 3 4 5 6 7 8 9 10 11 12 [13] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Таблица 6 Обороты валов и передаваемые мощности нормальных вариаторов системы Светозарова
Примечания: 1. Если указаны два значения мощности, то меньшее соответствует минимальному числу оборотов выходного вала. Если указано одно значение мощности, то это означает, что она может быть передана на всем диапазоне регулирования. 2. Передачи 2-ТУ-6 и 3-Т-4М допускают непосредственное соединение с двигателями, имеющими п = 2900 об/мнн, но без длительного превышения указанной максимальной мощности. 3. (2-Т-4) - является модификацией 2-ТУ-6. 4. Кроме 6М-С-4С, все указанные передачи допускают вертикальное расположение валов. 5. Для передач 6М-С-4С при мощности 100 кет рекомендуется кратковременный режим работы. Более подробный расчет величин, определяющих характеристику вариатора при нажатии дисков путем перемещения роликов 2, приведен в гл. 1, раздел 2. Угол подъема т канавки самозатягивающего механизма (рис. 50) определяется из условия FNfP, (3.28) л - Рз COS (ае - -f) - окружное усилие. Подставляя значения Р в равенство (3.28), получаем А/> " / [Л - Р2 COS (а - ср)] • Рассматривая равновесие диска 3, имеем Qs = N sin (йе - 9), (3.29) 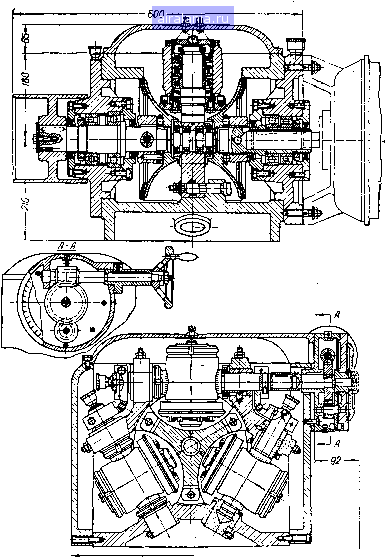 607 Рис. 53. Конструкция вариатора ЭНИМС. Мз sin (Я - ср) Q3 = (3.30) / [Л - Рг cos (я - !?)] Сила Qg создается самозатягивающим механизмом и определяется в соответствии с рис. 50 О - - - <з- tg- (3.31) «о 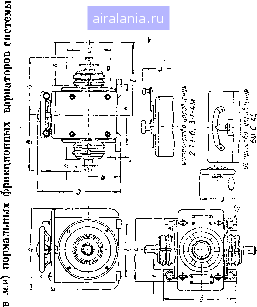 S g-м
 Приравнивая правые части равенств (3.30) и (3.31), получаем f [Л - Ра cos (g - у)] Гш sin (а - ?) tgT> (3.32) Максимальные напряжения сжатия в зоне контакта шарика определяются по формуле (3.25). В заключение следует отметить, что при наличии ряда преимуществ рассматриваемого вариатора перед заграничными изготовление его требует 2-го класса точности. Кроме того, наличие большого числа сопряжений в механизме рамки, поддерживаюш,ей ролики, не обеспечивает точной установки двух роликов в положение, при котором они бы вращались с одинаковым числом оборотов, поэтому создается дополнительное скольжение в зоне контакта роликов с дисками и износ их. Такой же торовый вариатор конструкции" ЭНИМС с тремя промежуточными роликами показан на рис. 53. Диски выполнены самоустанавливающимися. Вариатор рассчитан для передачи мощности до 10 кет при числе оборотов входного вала = = 1500 об/мин. Диапазон регулирования Д = 6,25, 11. ПЛАНЕТАРНЫП ВАРИАТОР СИСТЕМЫ «КОЛУМБИЯ» Схема вариатора системы «Колумбия» представлена на рис. 54. Ведущий / и ведомый 7 валы вариатора расположены соосно. 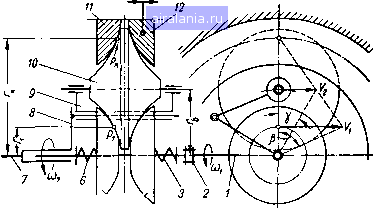 5 4 Рис, 54. Схема вариатора системы «Колумбия». На ведущем валу / (рис. 55), который состоит из двух частей, соединенных пальцевой муфтой 2, закреплены два сферических диска 5 я 4, сжатые винтовыми пружинами 6 я 3. Ведомый вал, 7 (см. рис. 54) жестко соединен с трех поводковым водилом 8. На каждом поводке водила свободно в осевом направлении посажена качающаяся вилка 9 с роликом W, который" может вращаться в подшипниках вилки. Планетарные ролики W с одной стороны опираются на фрикционные диски 5 я 4 ведущего вала, с другой -на кольца 12 я И. Кольцо 12 может перемещаться в направляющих параллельно оси ведущего вала, а кольцо И - неподвижно. Когда кольцо 12 находится в левом крайнем положении, ролики 10 катятся по большему диаметру дисков 5 и и ведомый вал при этом получает наибольшее число оборотов. При смещении кольца 12 вправо пружины 3 я 4, удлиняясь, изменяют положение роликов и этим самым изменяется чJcлo оборотов ведомого вала в сторону уменьшения. В вариаторах рассматриваемого типа диапазон регулирования Д до 5. Передаваемая мощность не более 18 л. с. Передаточное отношение вариатора определяется из плана скоростей (рис. 54) (3.33)  Рис. 55. Механизм ведущих дисков вариатора системы «Колумбия». 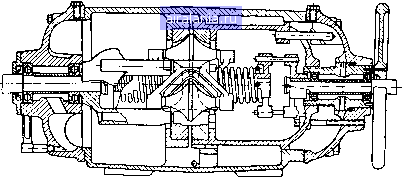 Рис, 56. Конструкция вариатора системы «Колумбия», здесь tg,B = -i-, tgT = f и 1 к - г г - Гь Подставляя значения tgP и tgy в (3.33), получаем (г*-г1)- 1 [к~гь) (3.34) Радиусы Гк, я соответственно Гь определяются полюсами качения pj я Pk. Конструкция вариатора изображена на рис. 56. Следует отметить, что габариты вариатора по длине большие, детали поводка вследствие больших изгибающих моментов при относительно небольших усилиях громоздкие. 0 1 2 3 4 5 6 7 8 9 10 11 12 [13] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 0.002 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||