
|
|
|
Главная -> Механические вариаторы скорости 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [17] 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 [с]к - допускаемое напряжение на кручение для материала пружины в кг/см, выбираемое по табл. 10; С = - индекс пружины, определяющий отношение среднего диаметра D пружины к диаметру d проволоки (С = 4--12); 4С + 2 k = - коэффициент, учитывающий напряжения среза, угол подъема витков и влияние кривизны проволоки пружины. Таблица 10 Механические свойства пружинных сталей п допускаемые напряжения на кручение [т] для витых пружин сжатия, в кг/ми
Примечание. - предел пропорциональности; а - предел прочности; - предел текучести. Первоначальный прогиб fo пружины (рис. 68), соответствующий положению ремня на наибольшем радиусе раздвижного шкива, определяется по формуле f 8T„iD (4.9) где i - число рабочих витков пружины; Го - минимальное усилие, действующее на пружины, определяемое по формуле (4.6) при = .„акс; G - модуль упругости материала пружины при сдвиге в кг/см. При положении ремня на наименьшем радиусе /?мви прогиб пружины равен ff + h- (4.10) В соответствии с рис. 68 fl = 2 (/?„акс - мии) tg т. (4.11) * Данные приведены для термически обработанных пружин. Закалка пружин производится в масле при температуре 780-880° С в зависимости от состава стали. Отпуск - при температуре 400 - 500° С. Подставляя в формулу (4.10) значение /о из уравнения (4.9), /j -из уравнения (4.11), и Го - в соответствии с формулой (4.7), после преобразований получаем (4.12) Формула (4.12) определяет число рабочих витков пружины, удовлетворяя условию, при котором нормальное давление между дисками и ремнем при R = Rmhh и Rx= Rm3kc в соответствии с принятым коэффициентом надежности р равно необходимому давлению, а при любом другом радиусе - больше необходимого (максимальное отклонение не превышает 4%). Длина пружины 1д в свободном состоянии определяется соотношением /о = /о + f, + -f (i + 2)d-f-5 мм. (4.13) 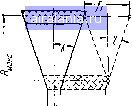 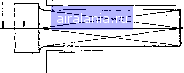 Шаг витка пружины в свободном состоянии равен (4.14) Рнс. 68. Схема перемещения диска шкива клиноременного вариатора. где 2 -число нерабочих витков пружины. Определение пределов регулирования скорости В соответствии с рис. 69 для шкива, состоящего из двух дисков, \ = [/?„акс - /?мии + + (Л - К)\ tg Т. откуда Rttav-tRwn 2tg7 (4.15) (4.16) где Co - ширина ремня по наиболее растянутому слою; h - высота сечения ремня; 2у - угол желоба шкива. Для шкивов, состоящих из трех дисков (рис. 70), имеем где Ci + ei. Подставляя в формулу для /?макс значения: после преобразований получаем /?макс = /?ми«+-2/г. (4.17) Обозначая наибольший радиус ведомого шкива R2 макс И наименьший /?2мин, зависимость между которыми определяется теми 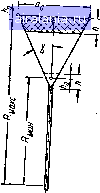 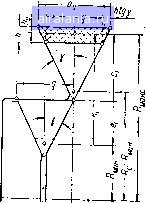 ГвТхдисвивГГрТмеТо ехлиско перемещения дисков вариатора. трехдискового шкива клиноременного вариатора. макс - 2 макс мин и наименьшее передаточное отношение вариатора / 2мин Мин - - . J-J . "макс «\к"орости 1;р;аГрГ"\™" Де-диапазон регули- •2 мак 1акс 2 минмин (4.18) знаЗниТр 2 мин :/?м„и == (в и подставляя в формулу (4.18) Лв = 1 + M„„B2tg7 .2tg7 мнн в (4.19) Обозначая через имеем Лв = , , 1 + в , и» (4.20) Подставляя в формулу (4.18) значения /?2макс и /?„акс в соответствии с формулой (4.17), получаем для вариатора с трехдис-ковыми ведущим и ведомым шкивами Соответственно, обозначая через 2и = -Ч (4.21) имеем д; = 1 + 2м (4.22) Анализируя формулы (4.20) и (4.22), замечаем, что при данном i?MHH, hay диапазон регулирования Дв зависит от йд и ib. Однако величина ig при значениях больше единицы мало влияет на диапазон регулирования, следовательно, основным параметром, влияющим в большой степени на Д, является ширина ремня. Расчет ремней клиноременных вариаторов скорости Определение основных размеров деталей клиноременных вариаторов (выбор сечения ремня, минимального диаметра шкива, определение числа ремней и т. д.) производится в такоА же последовательности, как и при расчете обычной клиноременной передачи. 2. КОНСТРУКЦИИ шкивов с РАЗДВИЖНЫМИ ДИСКАМИ Конструкция шкива с раздвижными дисками показана на рис. 71. Диск 2 при натяжении ремня 3 может перемещаться вдоль оси по ступице 5. Пружины /, установленные на пальцах, затягиваются одной общей шайбой 7 посредством гайки. Винт 6 может служить ограничителем величины перемещения диска 2 относительно ступицы 5. Диск 4 закреплен на ступице 5 неподвижно. Предел изменения диаметра шкива можно увеличить, применяя конструкцию шкива (рис. 72), который состоит из трех дисков. Диск 6 этого шкива закреплен на ступице 3 неподвижно, а диски 9 и 7 подвижны в осевом направлении. Положение дисков на рис. 72 соответствует расположению ремня 8 на наибольшем диаметре. Вначале, при увеличении расстояния между цент- 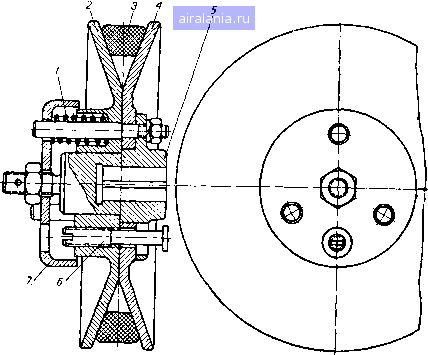 Рис. 71. Конструкция двухдискового шкива клиноременного вариатора. рами ведущего и ведомого шкивов, перемещается диск 7 справа налево, диск 9 при этом остается неподвижным. Крайнее левое положение диска 7 бпределяется совмещением клинообразной круговой канавки на пальце 5 с выступом фиксатора 1. Этому положению соответствует расположение рабочих поверхностей дисков 7 и 6 по одной образующей. При дальнейшем увеличении расстояния между центрами шкивов начнет перемещаться диск 9 слева направо, фиксатор / при этом поднимется вверх, освободив палец Диск 9 и палец соединены между собой фасонной шайбой 4. Осевое усилие пружин 2 к 10 должно быть достаточным для передачи крутящего момента силами трения, возникающими между рабочими поверхностями дисков и ремнем. 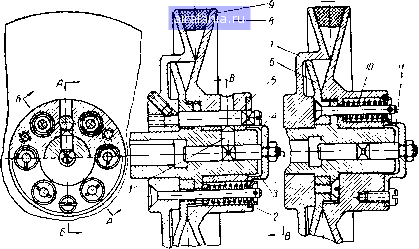 Рис. 72. Конструкция трехдискового шкива клиноременного вариатора. Другой шкив клиноременного вариатора может быть с постоянным диаметром или составленным из двух или трех дисков с возможным изменением диаметра, по которому огибается натянутый ремень, что значительно повышает диапазон регулирования скорости. Изменение положения ремня между дисками шкива осуществляется от руки, эпизодически, при остановленном двигателе. На рис. 73 показана конструкция такого шкива, составленного из двух дисков. Диск 5 жестко соединен со ступицей 3, которая неподвижно устанавливается на валу привода. Диск 4 может перемещаться вдоль оси на ступице 5 и фиксируется в заданном положении посредством гайки 1 и контргайки 2. Шкив, составленный из трех дисков, показан на рис. 74, Диск относительно ступицы 5 закреплен неподвижно, а диски 9 и 10 могут перемещаться вдоль ее оси. Перемещение дисков, а следовательно, и изменение положения 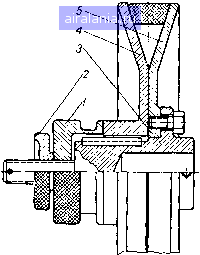 Рис. 73. Конструкция двухдискового шкива клиноременного вариатора, регулируемого во время остановки привода. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [17] 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 0.0067 | ||||||||||||||||||||||||||||||||||||||||||||