
|
|
|
Главная -> Механические вариаторы скорости 0 1 [2] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Условие (1.10) в общем случае практически никогда не выполняется, так как при нажатии катков с большой силой, равной понижается коэффициент полезного действия вариатора, увеличиваются износ, трущихся поверхностей и габарить* всего механизма. Условие (1.11) соответствует цилиндрической форме катков,, а условие (1.12) - касанию катков по бесконечно малой длине образующей (например, в интеграторах). Формулу (1.4) удобнее анализировать, переписав в виде X ср /, b sin \ /Мх sin 52 fesin8a\ , ,„ Обозначая Мх sin 52 и решая это равенство относительно Q, получаем Мх sin 52 Q xcpl (1.14) Это известная формула, которой пользуются при расчетах в случае совпадения вершин образующих конусов, где р - так называемый коэффициент надежности. Подставляя у в формулу (1.13), имеем 1 sin bo l\ ftsinBjX (l.!5) В соответствии с (1.7) для радиуса начальной окружности ведущего катка*" / получаем По формуле. (1.15) радиус начальной окружности ведомого катка в случае смещения вершин конусов равен среднему радиусу при условии Ъ sin \ (1.17) X Ср В заключение следует отметить, что, как правило, размеры катков существующих и проектируемых вариаторов скорости удовлетворяют неравенству 1 fcsinbj «ср  поэтому радиусы начальных окружностей катков при расположении вершины ведущего конуса на образующей ведомого всегда меньше средних радиусов. Небезынтересным является рассмотрение случая холостого хода. По формуле (1.4) при Л!,, = О (1.18) так как Ь sinBa" В рассматриваемой схеме вершина 0 конуса ведущего катка расположена выше оси X и отрезок OOj считается положительным. Если Oi ниже оси X (рис. 4), то картина относительного сколь- 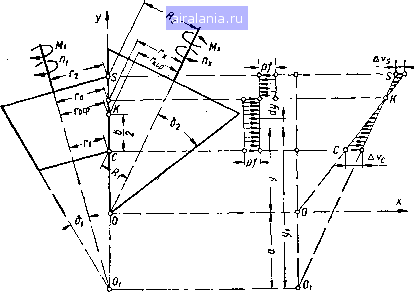 Рис. 4. Схема скольжения по линии контакта при расположении вершины ведомого конуса на образующей ведущего. жеиия и положение радиусов начальных окружностей и Го изменяется. Как и прежде, составляя уравнение моментов сил, приложенных к ведомому катку, получаем R, г„ sin 6j sin 6, sin 5, sin 6, - - J Py sin \dy + J pty sin S,dy = 0. (1.19) После интегрирования и преобразований, произведенных подобно тем, которые были сделаны в первом примере, получаем: Ь sin* 62 / , b sin 5; / 1 b sin f>i\ Для ведущего катка имеем: = [rg-(isin5,)-.gep /, , »sinSi / 1 , iS>sin6 (1.20) (1.21) (1.22) (1.23) 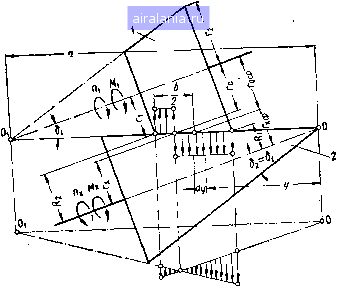 Рис. 5. Схема скольжения по линии контакта конусов, когда их вершины, ваправлены в разные стороны. •Радиус начальной окружности ведущего катка определяется также в зависимости от в соответствии с рис. 4: (1.24) / 1 • ч sin S, ro = ( + asin8,)-j-y. sin 62 Анализ формул (1.21) и (1.23) показывает, что радиусы начальных окружностей ведомого и ведущего катков при расположении вершины ведомого конуса на образующей ведущего всегда больше средних радиусов, даже при коэффициенте надежности Р = 00. Из изложенного вытекает, что при передаче вращения коническими фрикционными катками, проектируемыми с совпадением вершин конусов, в случае даже незначительного смещения ( +Да) происходит изменение радиусов начальных окружностей катков. -Передача в этих условиях работает с неустойчивым передаточным отношением. Выше рассматривались схемы вариаторов с катками, вершины образующих конусов которых направлены в одну сторону. Не исключена возможность расположения вершин конусов в разные стороны (рис. 5). Регулирование скорости при данной схеме может осуществляться перемещением катков вдоль оси вала при соответствующем изменении расстояния между валами. Углы §1 и §2 образующих конусов в рассматриваемом случае могут быть равными при параллельном расположении осей валов и различными при непараллельных валах. Результаты выводов не зависят от того, какая из схем рассматривается, так как условие равновесия каждого катка записывается отдельно. Как и прежде, определяя радиусы начальных окружностей катков по уравнению моментов сил, получаем для ведомого катка формулу (1.21) и для ведущего - формулу (1.16), из которых видно, что при расположении вершин конусов в разные стороны радиус Начальной окружности ведомого катка всегда больше среднего, а ведущего - меньше среднего радиуса. При известном радиусе начальной окружности ведомого катка радиус Гц ведущего катка в соответствии с рис, 5 определяется также по формуле г г, = sin 62/ sinSi. Определение максима.ьной скорости скольжения в зоне контакта рабочих тел Как указывалось выше, качение катков без скольжения происходит по начальным окружностям радиусов Го и г; все другие точки касания в зоне контактной поверхности имеют разные скорости, вследствие чего происходит неизбежное скольжение и износ катков. Величина скорости скольжения До = Di - изменяется по закону прямой (см. рис. 2) и имеет максимальные значения в точках, граничащих с максимальным и минимальным радиусами одного из катков, ограниченного по ширине размером Ь. Для ведущего катка 1 скорости точек С и 5 соответственно равны и для ведомого катка 2 где u)j и u)j5 - угловые скорости катков 1 я 2. 2 171 5=. Максимальная скорость скольжения в точке С равна Дос=УС2 -(Ь25) и в точке S vs-=vs, - vs. (1.26) Подставляя значения скоростей, заменяя О)] Г„ 1-2 X И пользуясь формулами (1.8) и (1.24), после преобразований получаем: п (гх±а sin 82) sin Al - --Г, Дох = (Oj В формуле (1.27) rxSlnOj (Гж ± а sin bj) sin b, Гд; sin bj r, = - 6 sin \. (1.27) (1.28) Из формул (1.27) и (1.28) следует, что при всех прочих равных условиях скорости скольжения увеличиваются с увеличением смещения а вершин конусов. Определение к. п. д. вариатора скорости Полный коэффициент полезного действия вариатора скорости, как и к. п. д. любого механизма, определяется отношением работы сил сопротивления, приложенных к ведомому звену, к работе движущих сил, приложенных к ведущему звену. Таким путем учитываются потери на преодоление всех вредных сопротивлений, возникающих в кинематических парах системы рассматриваемого вариатора: трение в подшипниках, трение качения в зоне контакта фрикционных катков и др. Наиболее приемлемым в практике методом вычисления к. п. д. является приближенный метод: сначала определяют реакции в кинематических парах без учета сил трения, а затем по найденным реакциям - работу сил трения и к. п. д. механизма. Считая решение этой задачи общеизвестным, рассмотрим только определение потерь на трение скольжения по линии касания катков. Воспользуемся известным соотношением между крутящими моментами ведущего и ведомого звеньев механизма откуда 18  где Tj - коэффициент полезного действия механизма; ii 2- ~ - передаточное отношение. Крутящие моменты и при положительном смещении вершин конусов соответственно определяются по формулам (1.3) и (1.6), при отрицательном смещении -по формулам (1.20) и (1.22). Подставляя в формулу (1.29) значения М, Mi,./i 2h Qj = ~2sfn" "-" преобразований получаем Го sin bj (ysinbj) rsinSa (Asin5,) (1.30) Го = (г, Та sin 8,)- sin 61 sinb, Верхние знаки относятся к случаю положительного смещения вершин конусов, а нижние - к случаю отрицательного смещения. Для схемы вариатора, у которого вершины конусов направлены в разные стороны, числитель формулы (1.30) имеет нижние знаки, а знаменатель - верхние. Частные случаи схем вариаторов Рассмотрим некоторые частные случаи схем вариаторов, у которых вершины конусов направлены в одну и в разные стороны. 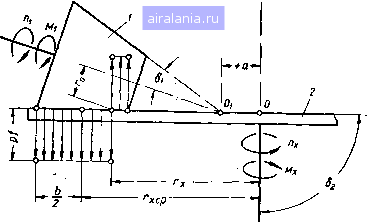 Рис. 6. Схема направления сил трения при bj = 90°. Изменяя угол образующей ведомого конуса в сторону его увеличения до = 90°, получим схему механизма, которая представлена на рис. 6. 0 1 [2] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 0.0046 |