
|
|
|
Главная -> Механические вариаторы скорости 0 1 2 [3] 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Формулы (1.15) и (1.21) для рассматриваемого случая будут иметь вид При положительном смещении вершины 0 ведущего конуса; которое .соответствует расположению катков на рис. 6, следует в формуле (1.31) принять верхние знаки, а при расположении вершины Oj справа от О - нижние знаки. 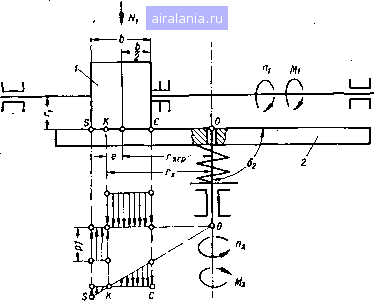 Рис. 7. Схема скольжения по линии контакта лобового вариатора скорости. В промышленности для передачи небольших мощностей применяется вариатор, схематически изображенный на рис. 7. Рассматриваемая схема представляет собой частный случай, соответствующий условиям: §2 = 90°, 8j = О, вершина ведущего конуса удалена на а= ± оз. Крутящий момент на ведомом валу в данном случае определяется по формуле (1.20), а радиус окружности катка 2 - по формуле (1.21). Крутящий момент Mj на валу ведущего катка 1 определяется по уравнению моментов сил где 20 I xzp Решая уравнение моментов сил относительно М, имеем Mi = 24-.-r«p). (1.32) Подставляя в формулу (1.29) по формуле (1.20), .М по формуле (1.32), ii 2 = и Al = = Q2. получаем Как* видно из формулы (1.33), -ц не зависит от г. (1.33) 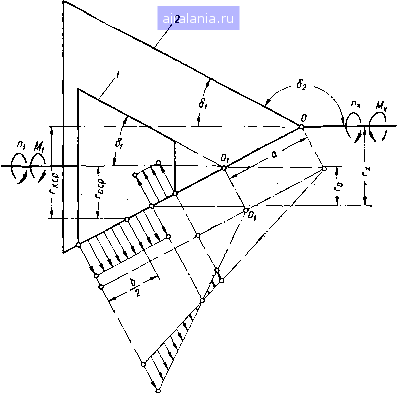 Рис. 8. Схема скольжения по линии контакта при Ь. > 90. Увеличивая угол 82 образующей ведомого конуса до величины, большей 90°, получаем вариатор скорости с одним внутренним и другим внешним конусами (рис. 8 и 9). В большинстве случаев такие вариаторы строятся с параллельным расположением осей валов, поэтому sin 81 = sin 82, 8 + 82 = 180°. . . Формула (1.15), определяющая радиус ведомого катка, остается в силе, так как смещение вершин конусов положительное. Средний радиус Госр ведущего катка у вариатора на рис. 8 постоянный, ведомого - переменный; на рис. 9 - наоборот. Размеры радиусов связаны зависимостью Го = - а sin 8i. Размещая два механизма, у которых вершины конусов направлены в разные стороны симметрично относительно оси А -А (рис. 10), получим схему вариатора скорости с взаимным уравновешиванием осевых усилий Q. Пружина 3 прижимает катки 1 и 2 с силой, достаточной для передачи вращения, и компенсирует износ их. Регулирование скорости осуществляется изменением расстояния А между осями валов. Заменяя подвижное соединение катков вдоль осей валов неподвижным, получим обычную фрикционную передачу с цилиндрическими клинчатыми 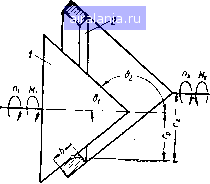 Рис. 9. Схема вариатора с постоянным средним радиусом ведомого и переменным радиусом ведущего катков. 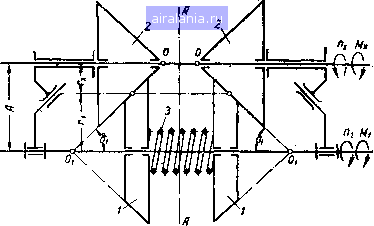 Рис. 10. Схема! сдвоенного вариатора скорости, у которого вершины конусов направлены в разные стороны. катками. Радиусы начальных окружностей катков определяются по формулам (1.21) и (1.16). Определение коэффициента скольжения вариатора Как было установлено выше, действительное передаточное отношение = - вследствие скольжения по линии контакта отлц- чается от передаточного отношения = --, определяемого по средним радиусам и зависит от коэффициента надежности реактивного момента на ведомом валу и геометрических параметров вариатора. Очевидно, скольжение и все связанное с ним (износ, к. п. д., нагрев и др.) будет тем больше, чем больше отличается /i 2 от il-2. Для сравнительной качественной оценки вариаторов скорости принято пользоваться так называемым коэффициентом скольжения, который определяется зависимостью s= 1 - (1.34) Подставляя значения радиусов г, и Го в соответствии с (1.15), (1.21), (1.16) и (1.23) в (1.34), после преобразований получаем s= 1  (1.35) Знаки минус относятся к случаю, когда вершина ведущего конуса расположена на образующей ведомого. При расположении вершин конусов в разные стороны в верхней строчке следует поставить знаки минус, а в нижней - знаки плюс. Следует заметить, что в последнем случае коэффициент скольжения получается более высоким, а к. п. д. более низким, чем при расположении вершин конусов по одну сторону контактной площадки, при которых коэффициент скольжения е составляет примерно 2 - 5%. Для лобового вариатора скорости (см. рис. 7) коэффициент скольжения е = 1 ccpl Г1Гх хер Гх Подставляя значение г в соответствии с формулой (1.31) при 82 = 90°, получаем 1±1 L V 4г (1.36) Знак плюс относится к случаю, когда каток / является ведущим, и знак минус -когда ведомым. Как видно из формулы (1.36), с уменьшением гср коэффициент скольжения возрастает. 35 30 25 20 15
Рис. 11. График изменения коэффициента скольжения лобового вариатора. На рис. И дан график изменения s в зависимости от гжср при fc = 20 мм и р = 1,2. 2. ВАРИАТОРЫ, У КОТОРЫХ ОБРАЗУЮЩАЯ КАТКОВ ЯВЛЯЕТСЯ ДУГОЙ ОКРУЖНОСТИ Определение линейных давлений в зоне контакта рабочих тел В современном машиностроении широкое применение получили вариаторы скорости с катками, рабочие поверхности которых образованы вращением дуги окружности относительно осей валов. На рис. 12, а показана схема такого вариатора. Передача движения от одного катка к другому осуществляется силами трения, возникающими по контактной линии ВН вследствие прижатия катков друг к другу с достаточной силой. Последнее можно осуществить перемещением катка /, перемещением катка 2 или одновременным перемещением обоих катков вдоль их осей вращения. Каток /, так же как и каток 2, может быть ведущим или ведомым. Передаточное отношение вариатора изменяется поворотом вала катка 2 относительно оси, перпендикулярной к плоскости чертежа и проходящей через точку 0. Скорости точек катков по дуге касания различны, поэтому неизбежны скольжения катков, износ их и потери мощности на трение. С уменьшением ширины Ь катка 2 скольжение уменьшается, но увеличивается давление р по контактной линии, которое не должно превышать допускаемых значений, зависящих от материала катков. Как и в предыдущей задаче, допускаем, что давление распределяется не по площадке, а по линии. Однако в зоне контактной линии рассматриваемого вариатора линейное движение распределяется неравномерно, особенно при большой ширине катка 2. Кроме того» максимальное давление возникает в одной из крайних точек и или В линии контакта и зависит от того, перемещением какого катка {1 или 2) осуществляется необходимое нажатие, обеспечивающее работу вариатора без буксования. Следует также заметить, что давление между катками должно быть больше необходимого (расчетного) на 15-20%. 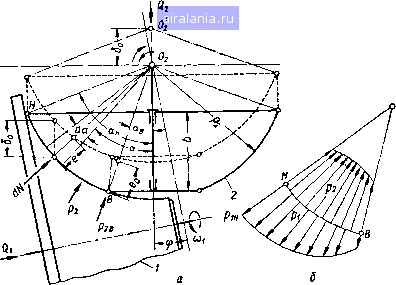 Рис. 12. Схема распределения линейных давлений при перемещении катка 2 и неподвижном катке /. При большом же значении давления будут происходить излишние затраты энергии на преодоление трения, возникающего вследствие неизбежного геометрического скольжения, и ряд других нежелательных явлений. В современных конструкциях рассматриваемого вариатора давление между катками осуществляется перемещением катка / силой Qi, при этом наибольшее давление pui всегда будет возникать в точке Н, более удаленной от оси вращения катка 5, и наименьшее - в точке В (рис. 12, б). Неравномерность распределения давления зависит от положения оси вращения катка 2 и наиболее неблагоприятной бывает при наибольших значениях передаточного отношения. Боле рациональным для рассматриваемого вариатора (8) следует считать прижатие катков посредством перемещения катка 2 с силой (?2- этом случае неравномерность распределения линейного давления Ра (Рис. *12, б) не зависит от положения катка 2 0 1 2 [3] 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 0.0098 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||