
|
|
|
Главная -> Механические вариаторы скорости 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 [31] 32 33 34 35 36 Передача масла к тому или иному поршню определяется положением золотника (рис. 147), который связан с пультом программного управления. Рассматриваемая система регулирования скорости может быть применена для условий, соответствующих работе одношпиндель-ного автомата. 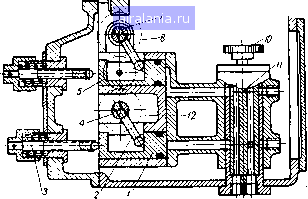 Рис. 147. Схема гидравлического механизма управления вариатором. Следует также отметить, что данный вариатор не пригоден для работы с реверсивным движением. Изменение технологии производства влечет за собой только перестройку положений упоров 3. Определение сил, действующих на ролик при параллельном расположении его оси относительно линии центров дисков На рис. 148, а показана схема лобового вариатора. Диск/ - ведущий, ролик (расположенный под диском) -ведомый. Из графика скоростей скольжения видно, что в любой точке касания результирующая скорости скольжения может быть разложена на две составляющие, одна из которых направлена по касательной к окружности ролика, а вторая - параллельно его оси. Скорость по касательной в одной из точек по линии контакта равна нулю, максимальные же значения соответствуют крайним точкам. Ограничивающим ширину ролика. Скорости скольжения, направленные параллельно оси ролика, в любой точке равны Оо = = const, где Е - величина смещения оси ролика; ш, - угловая скорость ведущего диска /. Максимальная скорость скольжения по касательной в точке а определяется разностью скоростей где Uap = о)р Го - скорость ролика; * I составляющая скорости диска; о)р = - угловая скорость ролика; Го - радиус ролика; Ъ - ширина ролика; е -величина смещения (от средины ролика) точки k касания ролика с диском, в которой скорость скольжения по касательной равна нулю; / - радиус, определяющий положение точки k. Подставляя значения у„р и t»„i в формулу (6.1), получаем 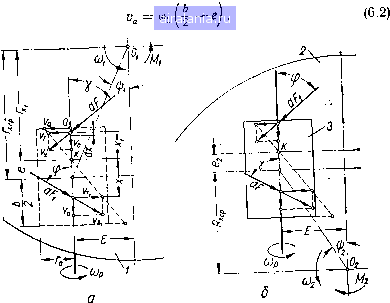 Рис. 148. Схема сил, действующих иа ролик лобового вариатора с перекрещивающимися осями валов при холостом ходе. Скорость скольжения по каЬательной в произвольной точке касания определяется из соотношения - fa Подставляя значение t>„ по формуле (6.2), имеем (6.3) Положение результирующей скорости скольжения и силы трения dF в произвольной точке касания определяется по схеме (рис. 148, а). Соответственно (6.4) dF cos ср. (6.6) Точно такие же соотнощения получим, рассматривая лобовую фрикционную передачу (рис. 148, б), когда ролик 5 является ведущим, а диск 2 - ведомым. Суммарная составляющая сил трения, приложенных к ролику, направлена вдоль его оси и при работе вариатора вхолостую равна So = S + S, (6.5) 5з= j dFcosj и 5 = Обозначая силу прижатия диска / к ролику 3 через .Q, определим элементарную силу трения dF,=dF = fpdx = fdx. Подставляя значения dF и dF в формулы (6.6) и заменяя после интегрирования и преобразований получаем , (6 -2в)+ \/iE + {b - 2ef , 2£ + , . (b + 2е) + V4E + (b + 2ef -jr III 2-Е-• (6-7) Величину 5(, с достаточным приближением можно определить при е = О, тогда o-Q-fe In-2-. (6.8) Для ролика, зажатого между двумя дисками 1 я 2, как это имеет место в рассматриваемой схеме, получаем S„ = 4Q/ln±iil±=4Q/C. (6.9) !Д1 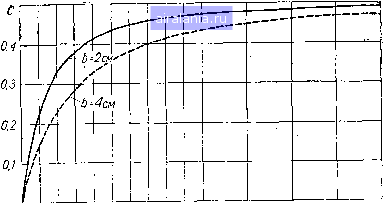 О 0.2 0.4 0.6 0.8 1 12 14 16 18 2 2.5 3 3.5 Е см Рис. 149. График зависимости С = f (Е) при 6=2 см и при 6 = 4 см. Значения С = f(Е) при & =:2ш и & = 4слг даны на графике (рис. 149), Формула (6.9) определяет усилие 5о, приложенное к ролику при холостом ходе и направленное вдоль его оси. При работе над нагрузкой крутящий мо- -ч мент М, приложенный к f„ диску /, и реактивный мо- Л, мент, приложенный к диску 2 (рис. 150), также создают усилия, приложенные к ролику, а их составляющие, направленные вдоль оси, определяются из равенств (рис. 150): Sm, = cos sin == M, tgL (6.10) •Sm, = #cos2sin2 = M2 tg Ф; (6.11) 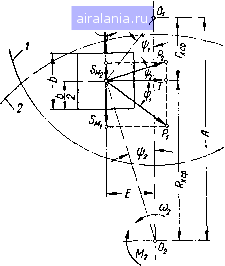 (J „ /К 19\ Ри- 50. Схема сил, действующих на ом - "JjM, OjM,. (D-l-) ролик вариатора от внешних моментов. Без учета к. п. д. вариатора момент на ведомом диске 2 равен д:ср (6.13) 191 Подставляя значения Sm, и Sm. в формулу (6.12) и заменяя по формуле (6.13), после преобразований имеем Sm = Из рис. 150 находим tg ti = и tg 2 = ; Е . . Е хер Подставляя эти значения в формулу (6.14) и обозначая /?хср : /*cp=t и соответственно Гхср = j-qjj, получаем 8м = М,Е{1 +
-0,!8~ -0,165 -0.12- 0.09--0.075 I Уб /51/4 mWi Е=2см -Е-1см Л2 +£2(1 ;)2 "Л+£2(1 f. , (6.15) 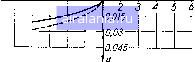 или Sm = Mi/. Значение fy = /(t) для £•= 1 сл« и = 2 ш при А = 15 см даны на рис. 151. Суммарное усилие, приложенное к ролику и направленное вдоль его оси, при передаче крутящего момента j равно S = Sq Sm = 6 2£ -f Mi£(i + 1) Рис. 151. Номограмма и = f (i) при £ = 1 сж и при £ = 2 сж. АЧ + £2(1+ if Л2 + £2 (J f. /)2 . (6.16) Кроме осевого усилия, на ролик действует пара сил от составляющих, направленных перпендикулярно оси ролика. По рис. 148, а при е = О имеем dMp, =2dFxi sin т = 2Q/Xj sin 7. Заменяя sinT- , = -7, (6.17) Получим dMp, = 2Jf xfdx Ve + (6.18) Интегрируя полученное дифференциальное уравнение, после преобразований, имеем f и -. / ттт Р2 £ \ Для рассматриваемого вариатора, когда ролик зажат между двумя дисками, получаем f(b-/~ ГЛТ2 F2, £ \ j/..+(4)4fin . (6.19) 3. ВАРИАТОР С ПЕРЕМЕННОЙ УГЛОВОЙ СКОРОСТЬЮ НА ВЫХОДНОМ ВАЛУ (ВАРИАТОР РЕТТИХА) Ведущий вал 2 и ведомый 8 рассматриваемого вариатора (рис. 152) вращаются в одном направлении и за период одного оборота ведущего вала с постоянной угловой скоростью ведомый  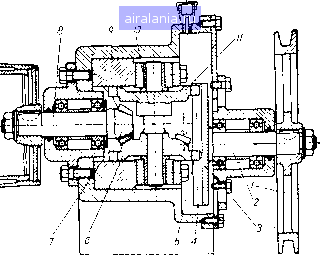 Рис. 152. Вариатор Реттиха. также совершает один оборот, но с переменной угловой скоростью, изменяющейся по закону синуса. Работа механизма осуществляется следующим образом. От шкива / клиноременной передачи движение передается ведущему валу 2, на котором жестко закреплена зубчатая рейка 3 в виде диска с зубьями 4, расположенными по всей плоскости диска. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 [31] 32 33 34 35 36 0.0025 | |||||||||||||||||||||||||||||||||||||||||||||