
|
|
|
Главная -> Механические вариаторы скорости 0 1 2 3 4 [5] 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 Обозначим cos а-с - cos а.т = В. (1.50) Для решения уравнения (1.50) определим геометрическую зависимость между углами и из треугольника OmOj (рис 16, г). По теореме синусов - (1.51) где 6 = 90° - (- cos sin I sin ip ф = 90° - сро = 2ic + f - угол, определяюш,ий положение катка 2. Подставляя значения 6 и ф в равенство (1.51), имеем после преобразований i„ "m Л - Р2 cos уо т - ""7 ~ tg "9 + Р2 cos Ч)„) (1.52) Подставляя в уравнение (1.52) значения о. Г\ - COS а т-/ 1 4- cos 1 - cos 1 + COS a И решая его относительно cos а, получаем cos am = 2Лр2 COS tpo - л* COS Ct - P2 COS* tpo COS Л= + pgcos • 2Лр2 COS fo COS (1.53) Полученное значение cosxm подставляем в формулу (1.50) и, обозначая А/р = К, после преобразований получаем cos «с = Y \COS сро COS сро + S - \cos 9(, к Таким же путем получаем coscp„ \2 / ВК , Bcosyo + n+2cosf„ + (1.54) cos а™ = 2 cos j COS tpo , cosyo \ /. ВК Bcoscp„ coso"*" к I \ 2costf(, 2К I (1.55) Анализ графика (рис. 16, с) разности скоростей катков показывает, что скорости скольжения могут быть и однозначными (рис. 16, б), что соответствует граничному положению, при котором происходит буксование вследствие недостаточной силы нажат Тия Q2 или вследствие увеличения момента Мх внешних сил до предельного. В этом случае а = *«мин соответственно COSOtc - cos Km = 0. Решая уравнение (1.49) относительно при «„3 = ""мин и обозначая силу нажатия, при которой cos - cos = О, через 2„нн необходимую силу нажатия - через = Q2„„hP, получаем О, = Оо 3 = Ра/ (COS ctg -COS af) (1.56) где p - коэффициент надежности, который рекомендуется принимать равным 1,15-1,2. Теперь исследуем работу вариатора, когда общая образующая начальных конусов пересекается с образующей катков не в двух, а в одном полюсе. Рассматриваемый случай соответствует условию, при котором полюс с уходит за пределы точки В или полюс т уходит за пределы точки Н. Полагая соответственно для каждого условия Кс = кв и ост = кя И обозначая точку пересечения образующей начальных конусов с образующей катков буквой е, из формулы (1.49) получаем ± cos = Y COS Kb 4- COS ая ± - в) + у (sin 2с(я - sin 2а) P2Q2/ (cos ад + cos Ct/) (1.57) Знак плюс относится к случаю, когда = ав, и минус - когда Необходимую силу нажатия катков для случая однополюсного качения можно определить по формуле (1.57), полагая, что начальный момент буксования имеет место при = ав или = кя (рис. 16, в). В результате решения этой задачи получим формулу (1.56). Важным в рассматриваемой задаче является определение угла сртс. в пределах которого происходит качение катков в двух полюсах. В общем случае переход от двухполюсного к однополюсному качению катков может быть при двух значениях zic-при повороте оси вращения катка 2 влево или вправо от вертикали. Кроме того, в каждом из этих положений оси катка 2 возможны два случая: за пределы контактной линии перемещается полюс с или полюс т. Это зависит от межосевого расстояния А и углов ав, «я и ср. В первом случае предельное положение определяется совмещением полюса с с точкой В, во втором - совмещением полюса гц с точкой Я. Решая уравнение (1.54) относительно сро при ас=ав, получаем, значение <ртс для первого случая 1 -f COS °В~ cos Од cos ср = К 2 cos - В /"1 + COS Од - BCOS Од 2 cos ад - в ")- (1.58) Соответственно решая уравнение (1.55) при о.т = н, определяем значение сртс для второго случая 1 + cos + В cos a cos ср;, = к 2 cos а „ + В 1 + cos2 afj + В cos а 2 2 cos + В ) (1.59) Определение передаточного отношения вариатора при ведущем катке 2 и ведомом 1 Напишем сумму моментов сил, приложенных к ведомому катку / (рис. 17) при ведущем катке 2 - М+Мт,с,-Мс,в-Мцг„ = 0. (1.60) Элементарный момент сил трения для любого участка дуги касания катков определяется по формуле dM = dNfrx. (1.61) Как и прежде, dN = РзРгсра. Плечо силы трения Гх определяется равенством Гх = Л -p2Cos(a -сро), (1.62) где сро = 2ic + ср. Подставляя значения dN и Гх п формулу (1.61) и заменяя cos (а - сро) = cos а cos ср -f- sin а sin сро, получаем = da -pacoscpj j cosada -pgsincfoj sin ada. (1.63) P2P2 Интегрируя правую часть равенства (1.63) в пределах дуг qS, ст, тН, соответственно получаем: Мсв = Р2Р2СР/ [(=1с, - ав) - pgcoscpo (sin а,, - sin 0.3) + + P2sincpo(cosa,, - cosas)]; (1.64) m,c,= PiPzcpf [A {a.m, - - P2cos cp (sin a.,„ - sin acj.+ + p2sincpo(cosa„, - cosa.J]; (1.65) ят, = р2Р2ср/ [A (ая - aJ - p2 cos cpo (sin a„ - sin a„J + + P2sincpo(cosa«-cosaJ]. (1.66) Подставляя значения Мс,в, Mm.c,, Мят, и рср из формулы (1.39) в сумму моментов (1.60), после преобразований получаем («т. - «с.) - (sin am, - sin а,,) - tg сро (cos а,, -- cos am.) P2 cos (po " Pa cos (po (ая - ав) - (sin ая- sin ад) - tg cp (cos ав - cos a«) + ("я - "в) + у (sin 2a - sin 2ag) P2Q2/ (cos + cos a,) cos <po (1.67) 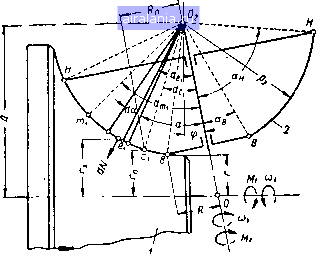 Рис. 17. Схема скольжения по линии контакта при ведущем катке 2 и ведомом /. Уравнение (1.67) решается табличным способом. Для этой цели следует задаться рядом значений а,, и по формуле (1.52) определить соответствующие им а,. Результаты действий, произведенных для левой части уравнения по каждому значению а,, и а, сравнивают с правой частью, которая для данного значения ср = 2ic ± ср является величиной постоянной. Подставляя в формулу (1.67) предельные значения углов а== = ая и а, = ав, соответствующие условию, граничащему с буксованием, получаем (ая - ав) - (sin ая - sin ав) - tg сро (cos ав - cos ад) = Ра cos (ро ("я - "в) + у Я - sin 2с(д) P2Q2/ (cos ад + cos afj) cos <fo (1.68) 35 Обозначая левую часть равенства (1.68) через D, определим необходимую силу нажатия (я ~в) + -2 (sin - sin 2ag) (1.69) Лрз/ (COS (2д + cos ct) cos Выше был рассмотрен случай пересечения образующей начальных конусов с образующей катков в двух полюсах. Пересечение образующих в одном полюсе соответствует двум условиям: а-с, = о-в при а = а «т, = «Я при а-с = ае, где б; - полюс качения. Подставляя эти условия в формулу (1.67), соответственно получаем 2 (о7„ " - " + =Ро cos а,, ) = Р2 COS (f„ («Я - as) - (sin ад -]- sin ая) + tg ср (cos а -f cos ая) ± («я -в)+-2 (sin 2с<я - sin 2а) P2Q2/ (cos cig + COS ctj) cos t (1.70) Рассматривая предельное значение угла а, граничащее с моментом буксования, когда а,. = ав или а = ая, получаем формулу (1.69), определяющую необходимую силу нажатия катков. Уравнение (1.70), как и уравнение (1.67), решается табличным способом. Передаточное отношение вариатора при ведущем катке 2 и ведомом / определяется отношением (рис. 17). при двухполюсном качении катков Га Л - Рз cos (а -у) л - Ра cos (а - ср) Ч-1 - - - (1-71) (1.72) 0 p2Sina PzSina И при однополюсном качении л - р2 COS (а,-ср) pasma Заканчивая исследования кинематики вариатора, следует отметить, что наименьшее скольжение, а следовательно, и наименьший износ катков имеют место при двухполюсном качении. Соотношение между Л и ср при двухполюсном качении катков определяется формулой (1.52), приведенной к виду А = P2C0S сро P2COS сро (1.73) Полагая, что а = а, = «я + «в получаем приближенно 1 +tg Л Р2 cos сро- /"Я + B = Р2 COS с H Т- В (1.74) Предельные значения углов ср, при которых качение одновременно происходит в двух полюсах, определяется по формулам (1.58) и (1.59). Определение коэффициента полезного действия вариатора Не останавливаясь на общеизвестных методах определения полного к. п. д. механизма, определим к. п. д. вариатора с учетом только потерь, возникающих вследствие геометрического скольжения катков в зоне контактной линии. Прежде всего рассмотрим случай, когда каток / - ведущий, а каток 2 - ведомый, качение катков происходит без скольжения в двух полюсах. В качестве исходного выражения, определяющего к. п. д. вариатора, принимаем известную формулу - = Mfc (•> где - крутящий момент на ведомом валу вариатора в кг-см; All - крутящий момент на ведущем валу в кг-см; z\ 2 - передаточное отношение. Крутящий момент на валу катка /, когда он является ведущим (см. рис. 16), определяется по формуле М-Мн-Мвс + М,„,0. (1.76) Подставляя в формулу (1.75) значения по формуле (1.48), ii 2 по формуле (1.44), Мц по формуле (1.66), Мвс по формуле (1.64) и М,пс по формуле (1.65), после ряда преобразований получаем Л - р2 cos(a - ср) "1-2=- р2 sin ас - (2a-2ayn+afj-ag) -cos ср„(2 sin а-2 sin a„j+sin а - sin а) 2 cos о.уп - 2 cos а + cos ag - cos a - sin cpo , (1.77) где ao = a. Предполагая, что в формуле (1.77) а = а.н при а = а или о-с = ав при о. = ае, а также кдк в одном, так и в другом слу- 0 1 2 3 4 [5] 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 0.0079 |