
|
|
|
Главная -> Теория антенных решеток 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 [66] 67 68 69 70 71 72 73 74 75 76 77 78 принимаемый сигнал нефлюктуирующий, соответствует модели (6 16) при a{t) = 1, b{t) =0, а мешающий шум - внутри-приемный Передающая антенна совмещена с приемной и формирует пространственно-временной сигнал с зависимыми от направления излучения а, р функциями амплитудной и фазовой модуляции Вектор сигналов на выходах приемных элементов записывается г (О = л/2Рс« {t - X, а, р) к (X, а, р) + п (О, (6 45) где к(х, а, р) - вектор размерности КХ1, 1-й элемент которого определяется /г, (х, а, )=f, (а, р) cos К - х)- х, а, р)+ф, (а, р)], 1=1 ~ К. К - число приемных элементов, т, а, Р - марковские процессы третьего порядка, получаемые в соответствии с алгоритмом (6 8) Так как оптимизация измерителя частичная, для получения сигналов ошибки по угловым координатам используется только пространственно-временной сигнал, а в матрице Якоби производные по оценкам а и р от диаграмм направленности приемных антенн отсутствуют D[S[t, iit)] дй да аа о о дЬ О (6 46) где для сокращения записей введены обозначения д/2Рс=1, uAu{t-x, а, Р), Axp{t-t, й, Р), кЛк(т, а, р), sAs(t, а, р) - векторы размерности КХ1, 1-е элементы которых /f,(t, а, P) = f,coSY„ s,(t, а, Р) = Г,зшух, У, = (Во:(-т)Ч-il)(i-t, й, p) + i, ф,Аф,(а, Р), f.Af.(a, Р). О - вектор-строка размерностью IXK с нулевыми элементами Используя введенные в (6 46) обозначения, запишем вектор сигналов ошибки «а выходах дискриминаторов измерителя "Л  (6 47) где Ыт - сигнал ошибки на выходе дискриминатора х и, = jkr it)~-u Z f?} + («о - 4) sr it) й, (6 48) Ua И ыр - сигналы ошибки, снимаемые с выходов дискриминаторов а и Р (6 49) «„={kr(0-4-fl}-- sr(0 (6 50) Подставляя (6 47) в уравнение оценки и опуская зависи-мость элементов матрицы Vit) от времени, получаем
KAt) x.At) -xixit) Kait) Kait) -a it) Xsa it) KAt) .At) I Х-гРр it) Jt, it)/ + V2iUa + 27"? \ / V2lU VnU + Vutla + U47«p 1)5,+ U54Ma + 57"p U6i"t + 64"а + 67«p U7l"t + 74«a + J77«p + i)94«a+ "97" (6 51) Алгоритм работы дискриминаторов этого измерителя представлен на рис 6 2, цепи фильтрации которого не отличаются от цепей фильтрации измерителя, синтезированного в п 6 3 2, и поэтому на рис 6 2 не приведены Из (6 51) следует, что измеритель содержит три взаимосвязанных следящих системы, две из которых, одинаковые по построению, предназначены для фильтрации процессов а и Р, а третья - для фильтрации процесса х Из сравнения (6 48) с (6 49) и (6 50) видно, что алгоритм работы дискриминатора х по своей структуре аналогичен алгоритмам работы дискриминаторов аир 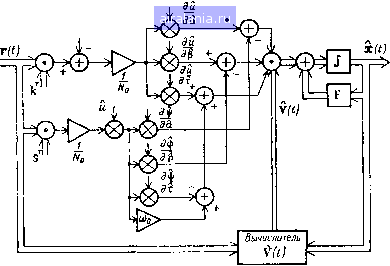 Рис 6 2 Структурная схема многоканального измерителя угловых координат и дальности при использовании пространственно-временных зондирующих сигналов Такое чисто внешнее сходство является результатом того, что угловые координаты а, р при пространственно-временных излучаемых сигналах, так же как и х, кодируются в одних и тех же функциях u(t - x, а, Р) и \p{t - x, а, Р) принимаемого сигнала Так как эти функции для пространственно-временных сигналов в ряде случаев нельзя представить в виде произведения временной функции и функции, зависящей только от а и Р, то обработка таких сигналов не разделяется на пространственную и временную при любом виде приемной антенной системы Каждый из дискриминаторов систем фильтрации угловых координат содержит по два канала, которые предназначены для выделения сигналов ошибки из функций амплитудной и фазовой модуляции принимаемого сигнала u{t - т, а, р), i:(i -т, а, Р) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 [66] 67 68 69 70 71 72 73 74 75 76 77 78 0.0465 | ||||||||||||||||||