
|
|
|
Главная -> Теория антенных решеток 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 [70] 71 72 73 74 75 76 77 78 ваемого i-м внешним источником шума на раскрыве приемной антенны, Db и Dr - матрицы коэффициентов передачи диаграммы приемных "антенн размером КХМ, i]-u элемент которых является коэффициентом передачи 1-й приемной антенны по /-му источнику внешнего шума для вертикальной и горизонтальной поляризационных составляющих соответственно, Шв(0 и Шг(/)-векторы внутриприемных шумов каналов приема вертикальной и горизонтальной поляризационных компонент размерностью КХ 1 Прежде чем записать уравнения фильтрации, определим структуру входящей в них обратной корреляционной матрицы шумов в приемных каналах для этого случая Корреляционная междуканэльная матрица В шумов для вектора выходных сигналов T{i) (7 7) имеет размер 2КХ2К, является блочной и записывается Вв Ввг Вгв Вс где Вв и Вг - корреляционные, а Вгв и Вт - рзаимно корреляционные матрицы шумов в каналах приема вертикальной и горизонтальной поляризационных составляющих, имеющие размер КХК Так как корреляционная матрица симметрична, то Вгв = Ввг, и для внешних шумов с хаотической поляризацией эти матрицы равны нулевой Ввг=Вгв = 0, так как вертикальная и горизонтальная поляризационные составляющие электромагнитного поля, создаваемого внешними источниками, некоррелированы Обратная корреляционная матрица при этом может быть представлена в виде блочной матрицы в- = ГВ7 О . ,0 В7" При синтезе измерителя эта матрица считается известной Если шумы внешних источников имеют нехаотическую поляризацию, то Ввг = Вгв =7 О, и структура матрицы В" имеет более сложный вид В реальной ситуации, как правило, В~ заранее неизвестна и должна определяться в процессе работы измерителя с помощью специальных вычислительных систем Ввиду пространственного перемещения источников шума, флюктуации их мощности матрицы В и являются случайными функциями времени и могут быть определены с использованием алгоритмов фильтрации случайных марковских процессов [1] Теперь, после того как структура матрицы В~ определена, запишем уравнения фильтрации Взяв производные по оценкам измеряемых параметров от опорного сигнала, вырабатываемого в измерителе по x{t), uU(«вcos Y - *вsin y} s[t, i{t)] = «fr{arCos Y -Ьгзшу} определим матрицу Якоби - (7 10) D[S[t, x{t)]] = 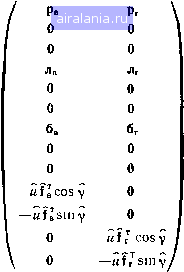 (7 11) где рв,рг,Лв,Лг,бв,бг -векторы размерностью \ ХК, определяе- мые как / дц dig Ч Лв = - II + й) (Йв COS Y - 5в sin Y), бв = II (йв COS Y - 5в sin Y) + + ulj ((Oo--§-) (йз sin Y + 5в COS Y), Запись векторов pr, Лг и бр отличается от записи векторов рв, Лв и бв только тем, что индекс «в» заменяется на «г» Подставляя (7 11) в уравнение оценки (6 18), получим р -р, о о У -Ух О О и11вГгв(0 COS Y - мЦвгЧв -«f 1в7гв (О sin Y + 1ВГf, а? jBr4 (О cos Y - м?7вг? г 4- (7 12) -uilBTr, (OsinY + MfjBrfr-f-/ = ("Ж" « + Тj «""" Y - 6вsin Y) + дй гт ВГ?г--(й?+5?) Переменные ti и iii в (7 12) записываются так же, как р и pi, С учетом того, что производные берутся по оценке угла Р у = f J ВГгв {t) \ (йв cos Y - 6в sin Y) + (йв sin + + 6в cos y) й (соо - )) + f вГг [t) {(d, cos y - 6r sin y) + + (fir sin y + 6r cos y) " (coo - , 1/. = i[fjBrfв(й1 + 5l) + fB7%{ul + 5?)] й 4. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 [70] 71 72 73 74 75 76 77 78 0.0023 |